



















linorobot入门教程-PID校准
linorobot入门教程-PID校准
说明:
- 为了保持导航堆栈发送的速度,您的PID控制器必须正确调整。
- 你可以使用lino_pid来调整你的PID常量。
步骤:
- 机器人电脑上打开两个终端
- 运行bringup
roslaunch linorobot bringup.launch
- 运行pid_configure
rosrun lino_pid pid_configure
- 在开发电脑上打开两个终端
- 运行teleop_twist_keyboard:
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
- 运行rqt
rqt
- 导入.perspective文件
- 点击 Perspective > Import
- 选择文件~/catkin_ws/src/lino_pid/lino_pid.perspective
- 在Dynamic Reconfigure窗口下,点击pid_configure
- 调整右边的PID值,驱动小车,然后检查图形结果
- 如图:
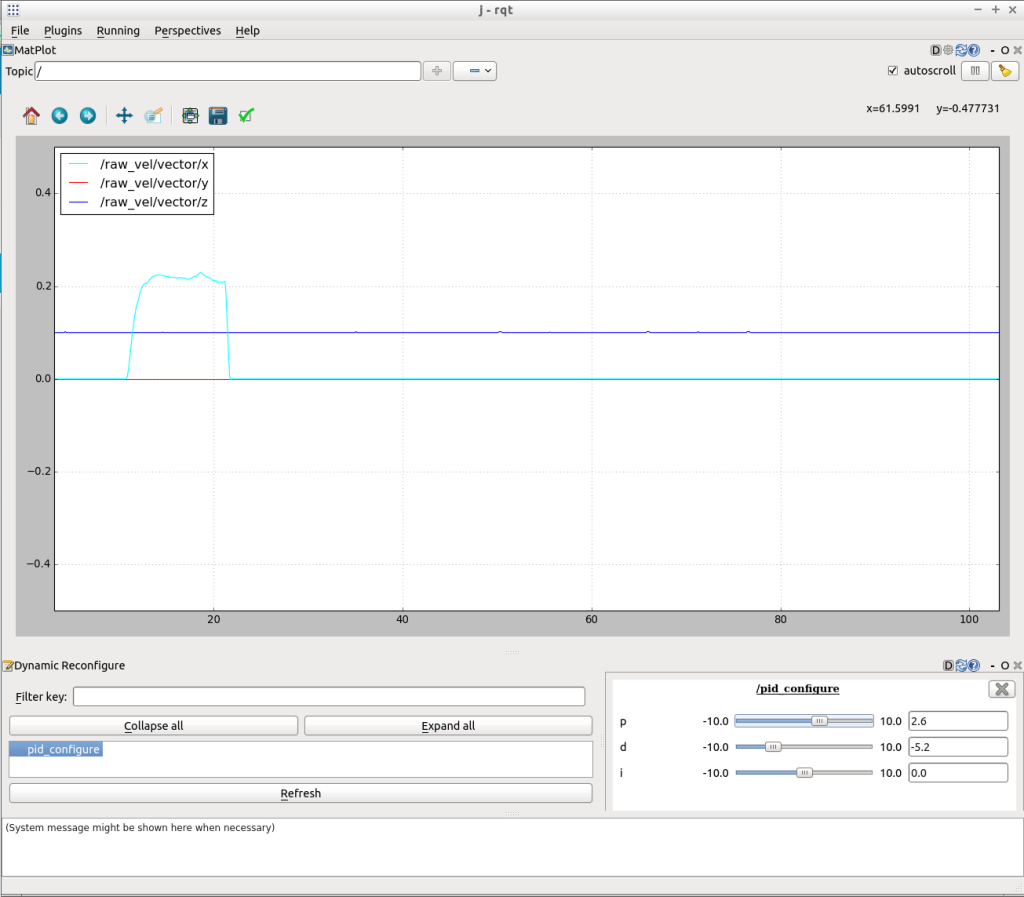
- 三线分别平滑运行即可
- 如何具体调整PID,可以参考文章pid_control
- 一旦调试好PID数值,记录并更改参数
roscd linorobot/teensy/firmware/lib/config
nano lino_base_config.h
- 分别修改如下值 K_P, K_I, K_D
#define K_P 0.6 // P constant
#define K_I 0.3 // I constant
#define K_D 0.5 // D constant
- 再次烧录固件
roscd linorobot/teensy/firmware
platformio run --target upload
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号