



















ROS与javascript入门教程-roslibjs-基本功能
ROS与javascript入门教程-roslibjs-基本功能
说明:
- 介绍如何利用roslibjs库发布话题,订阅话题,调用服务
github:
完整代码:
新建名称为simple.html
内容为:
<!DOCTYPE html>
<html>
<head>
<meta charset="utf-8" />
<script type="text/javascript" src="http://cdn.robotwebtools.org/EventEmitter2/current/eventemitter2.min.js"></script>
<script type="text/javascript" src="http://cdn.robotwebtools.org/roslibjs/current/roslib.min.js"></script>
<script type="text/javascript" type="text/javascript">
// Connecting to ROS
// -----------------
var ros = new ROSLIB.Ros({
url : 'ws://localhost:9090'
});
ros.on('connection', function() {
console.log('Connected to websocket server.');
});
ros.on('error', function(error) {
console.log('Error connecting to websocket server: ', error);
});
ros.on('close', function() {
console.log('Connection to websocket server closed.');
});
// Publishing a Topic
// ------------------
var cmdVel = new ROSLIB.Topic({
ros : ros,
name : '/cmd_vel',
messageType : 'geometry_msgs/Twist'
});
var twist = new ROSLIB.Message({
linear : {
x : 0.1,
y : 0.2,
z : 0.3
},
angular : {
x : -0.1,
y : -0.2,
z : -0.3
}
});
cmdVel.publish(twist);
// Subscribing to a Topic
// ----------------------
var listener = new ROSLIB.Topic({
ros : ros,
name : '/listener',
messageType : 'std_msgs/String'
});
listener.subscribe(function(message) {
console.log('Received message on ' + listener.name + ': ' + message.data);
listener.unsubscribe();
});
// Calling a service
// -----------------
var addTwoIntsClient = new ROSLIB.Service({
ros : ros,
name : '/add_two_ints',
serviceType : 'rospy_tutorials/AddTwoInts'
});
var request = new ROSLIB.ServiceRequest({
a : 1,
b : 2
});
addTwoIntsClient.callService(request, function(result) {
console.log('Result for service call on '
+ addTwoIntsClient.name
+ ': '
+ result.sum);
});
// Getting and setting a param value
// ---------------------------------
ros.getParams(function(params) {
console.log(params);
});
var maxVelX = new ROSLIB.Param({
ros : ros,
name : 'max_vel_y'
});
maxVelX.set(0.8);
maxVelX.get(function(value) {
console.log('MAX VAL: ' + value);
});
</script>
</head>
<body>
<h1>Simple roslib Example</h1>
<p>Check your Web Console for output.</p>
</body>
</html>
代码解析:
- 代码段:
<script type="text/javascript" src="http://cdn.robotwebtools.org/EventEmitter2/current/eventemitter2.min.js"></script>
<script type="text/javascript" src="http://cdn.robotwebtools.org/roslibjs/current/roslib.min.js"></script>
解释:首先加载需要的核心脚本库eventemitter2和roslib
代码端:
var ros = new ROSLIB.Ros({
url : 'ws://localhost:9090'
});
解释:
- 创建Ros节点连接到rosbridge v2.0 server
- 指定ROS服务器IP地址和端口号
- 更多ROSLIB.Ros文档可以参考:http://robotwebtools.org/jsdoc/roslibjs/current/
代码段:
ros.on('connection', function() {
console.log('Connected to websocket server.');
});
解释:增加监听事件,如果连接上打印已经连接的信息
代码段:
var cmdVel = new ROSLIB.Topic({
ros : ros,
name : '/cmd_vel',
messageType : 'geometry_msgs/Twist'
});
解释:
- 创建话题
- 更多ROSLIB.Topic文档:http://robotwebtools.org/jsdoc/roslibjs/current/
代码段:
var twist = new ROSLIB.Message({
linear : {
x : 0.1,
y : 0.2,
z : 0.3
},
angular : {
x : -0.1,
y : -0.2,
z : -0.3
}
});
cmdVel.publish(twist);
解释:
- 创建消息内容并发布
- 更多ROSLIB.Message文档:http://robotwebtools.org/jsdoc/roslibjs/current/
代码段:
var listener = new ROSLIB.Topic({
ros : ros,
name : '/listener',
messageType : 'std_msgs/String'
});
listener.subscribe(function(message) {
console.log('Received message on ' + listener.name + ': ' + message.data);
listener.unsubscribe();
});
- 解释:
- 创建订阅话题,获取内容后打印
- 与发布话题不同,这里提供一个回调函数处理获取的内容
- 代码段:
var addTwoIntsClient = new ROSLIB.Service({
ros : ros,
name : '/add_two_ints',
serviceType : 'rospy_tutorials/AddTwoInts'
});
- 解释:
- 创建服务对象
- 更多ROSLIB.Service文档:http://robotwebtools.org/jsdoc/roslibjs/current/
- 代码段:
var request = new ROSLIB.ServiceRequest({
a : 1,
b : 2
});
addTwoIntsClient.callService(request, function(result) {
console.log('Result for service call on '
+ addTwoIntsClient.name
+ ': '
+ result.sum);
});
解释:
- 创建请求对象
- 调用服务,通过回调函数打印结果
代码段:
ros.getParams(function(params) {
console.log(params);
});
var maxVelX = new ROSLIB.Param({
ros : ros,
name : 'max_vel_y'
});
maxVelX.set(0.8);
maxVelX.get(function(value) {
console.log('MAX VAL: ' + value);
});
- 解释:
- 单独获取参数
- 创建参数对象,设置和获取参数
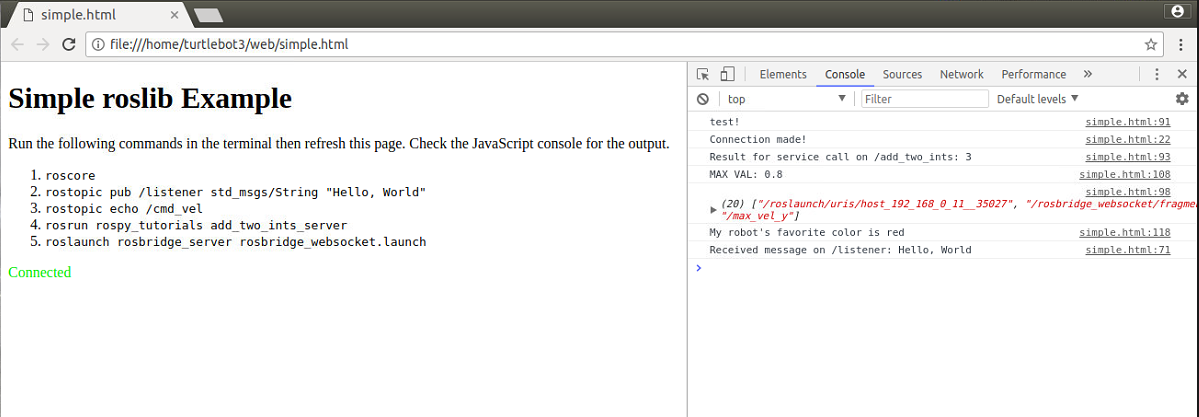
运行
- 安装相应的包:
sudo apt-get install ros-kinetic-ros-base
sudo apt-get install ros-kinetic-common-tutorials
sudo apt-get install ros-kinetic-rospy-tutorials
- 如果已安装ROS的桌面版,以上软件包已安装,只需安装如下包:
- rosbridge-server安装可以参考
sudo apt-get install ros-kinetic-rosbridge-server
- 服务器端,新终端,运行:
roslaunch rosbridge_server rosbridge_websocket.launch
- 效果图:

- 服务器端,新终端,运行:
rostopic pub /listener std_msgs/String "Hello, World"
- 服务器端,新终端,运行:
rostopic echo /cmd_vel
- 服务器端,新终端,运行:
rosrun rospy_tutorials add_two_ints_server
- 测试的网页通过浏览器上运行:
http://127.0.0.1/simple.html
- 或者直接拖动文件到浏览器
file://simple.html
- 效果图:
参考:
- http://wiki.ros.org/roslibjs/Tutorials/BasicRosFunctionality
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号