



















ROS与C++入门教程-搭建开发环境(Eclipse)
ROS与C++入门教程-搭建开发环境(Eclipse)
说明:
- 介绍如何安装Eclipse
- 介绍如何制作支持Eclipse的catkin包
- 介绍如何导入catkin包到Eclipse
- 介绍如何编译和测试catkin包
Eclipse安装
- 新版Eclipse已经包含jre,可以忽略安装安装JRE或者JDK
- 安装JRE或者JDK
apt-get install openjdk-7-jre
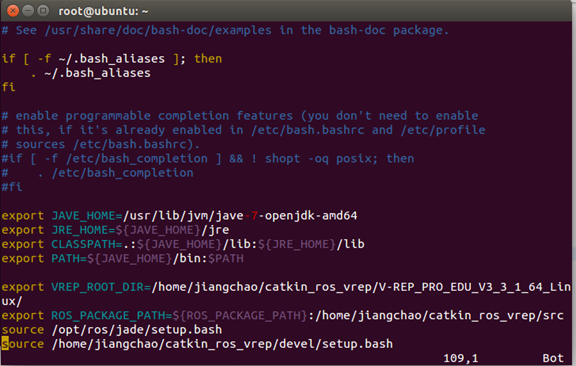
- 设置环境变量,
vim ~/.bashrc, 添加如下内容:
export JAVA_HOME=/usr/lib/jvm/jdk1.7.0_55
export JRE_HOME=${JAVA_HOME}/jre
export CLASSPATH=.:${JAVA_HOME}/lib:${JRE_HOME}/lib
export PATH=${JAVA_HOME}/bin:$PATH
- 下载Eclipse,推荐64位的系统, http://www.eclipse.org/downloads/?osType=linux。
- 安装Eclipse,移动安装包到/opt目录,并解压包
sudo mv eclipse-SDK-4.2.2-linux-gtk.tar.gz /opt/
cd /opt
sudo tar -xvf eclipse-SDK-4.2.2-linux-gtk.tar.gz
- 创建新的eclipse.desktop文件,在/usr/share/applications/中
touch eclipse.desktop
vim eclipse.desktop
- 加入以下行
[Desktop Entry]
Name=Eclipse
Type=Application
Exec=/opt/eclipse/eclipse
Terminal=false
Icon=/opt/eclipse/icon.xpm
Comment=Integrated Development Environment
NoDisplay=false
Categories=Development;IDE
Name[en]=eclipse.desktop
- 在/usr/share/applications目录中找到eclipse.desktop,并打开eclipse,托至启动栏

- 二进制安装和卸载:也可以apt-get方式进行安装和卸载,只不过安装的版本较低。
#安装
sudo apt-get install eclipse
#卸载
sudo apt-get remove --purge eclipse
安装CDT
- CDT是让你可以在Eclipse当中可以开发C/C++项目工具箱 (C/C++ Development Tooling)
- 安装
sudo apt-get install CDT
编写ROS包
- 建立测试目录和文件
mkdir catkin_ws #建立工作目录
mkdir src #在工作目录下建立src文件夹。
#切到src目录下,我们开始建立包,后面的东东都是依赖项
catkin_create_pkg hello rospy roscpp std_msgs 。
#切到hello 包目录下,此时会多几个文件,切到src目录下
#新建自己的程序。也就是节点程序,开始写你的代码就行。
vim hello.cpp
- 内容如下:
// a simple "hello" ROS program.
// by taiping.z
// 2016/03/08
#include "ros/ros.h"
#include "std_msgs/String.h"
using namespace ros;
int main(int argc, char **argv)
{
ros::Time::init(); //定时器初始化
ros::init(argc, argv, "hello"); //节点初始化
ros::Rate loop_rate(10); //定时10ms
while (ros::ok()) //节点是否正常工作
{
ROS_INFO("%s", "hello world !"); //打印节点信息
ros::spinOnce(); //节点只循环一次
loop_rate.sleep(); //不够10ms的补充到10ms为止。
}
return 0;
}
- 添加依赖项,在切回来到hello 包底下,在CMakeLists.txt文件中添加依赖项,。
add_executeable(hello src/hello.cpp) #其实会生成hello.exe的名字
Target_link_libraries(hello ${catkin_LIBRARIES}) #添加节点编译需要的库文件。
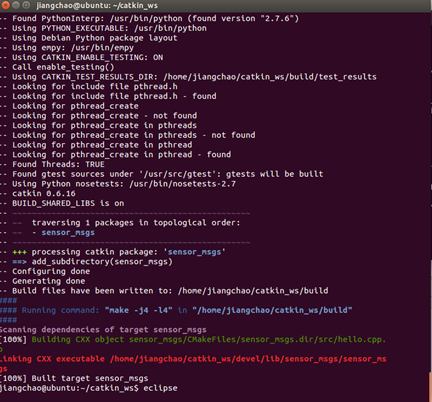
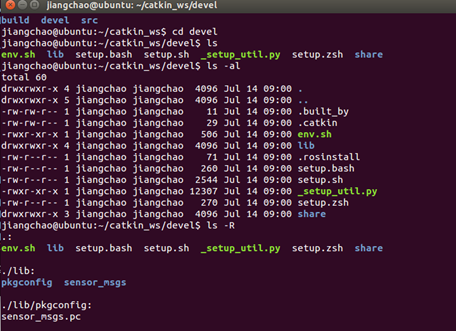
- 开始编译整个项目
Catkin_make –force-cmake –G"Eclipse CDT4 – unix makefiles" –dcmake_build_type=debug –dcmake_eclipse_make_arguments=-j8
增加 –-force-cmake之后,表示强制编译,编译工具用的CDT4,且会生成两个文件 .project ,此project 也就是在Eclipse里面要用到的。
编译图示:
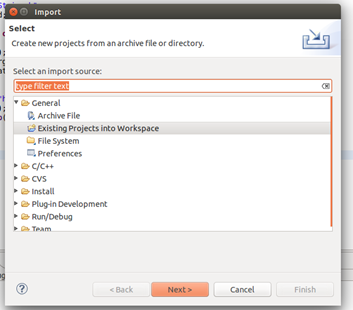
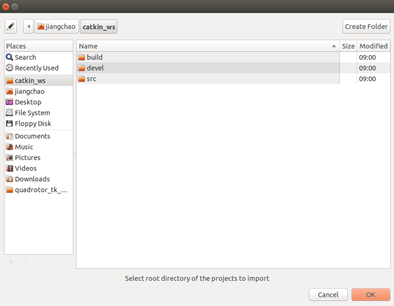
导入ROS包到Eclipse
- 通过已存在的包导入

配置eclipse里面导入的工程
在导入的项目名称,右击—debug as – debug configurations,配置一下 C/C++ Application
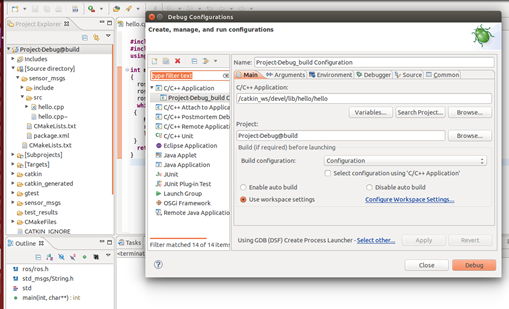
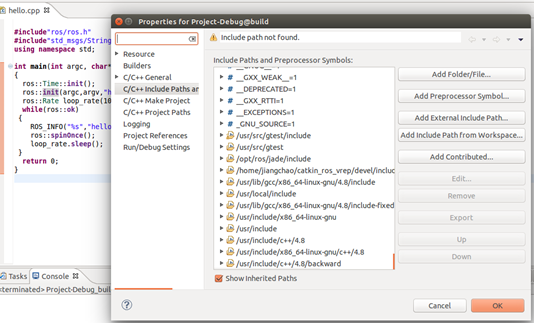
下面的库文件都是自动配置好的,假如你的Eclipse里面没有的话,表示没有配置成功。
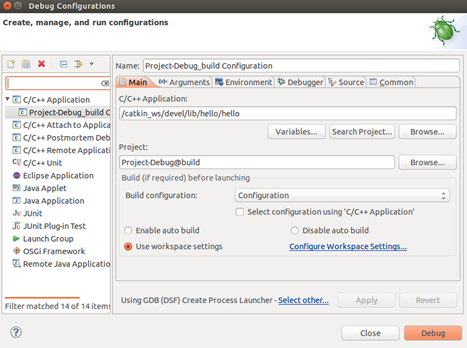
当上面的工作都做好以后,我们就可以进行debug了。
选择下面的debug项进行调试,但是需要先打开roscore
运行后的界面

参考:
- http://www.cnblogs.com/zhuxuekui/p/5672199.html
- http://blog.csdn.net/yangziluomu/article/details/50848357
- http://blog.csdn.net/anzhu_111/article/details/5946634
- http://www.cnblogs.com/lidabo/p/3808464.html
- http://wiki.ros.org/IDEs#Reusing_your_shell.27s_environment
- http://archive.eclipse.org/eclipse/downloads/drops4/R-4.2.2-201302041200/linPlatform.php#EclipseSDK
- http://blog.csdn.net/benshu_001/article/details/8309870
- http://blog.csdn.net/sunbibei/article/details/45319457
- http://www.cnblogs.com/dflower/archive/2010/05/13/1734522.html
- http://ros-users.122217.n3.nabble.com/Catkin-Eclipse-Integration-td4020223.html
- http://www.cnblogs.com/freedomshe/archive/2013/05/16/configure_eclipse_in_catkin.html
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号