



















一起做RGB-D SLAM (7)-添加回环检测
一起做RGB-D SLAM (7)-添加回环检测
说明:
- 上节介绍了图优化软件g2o的使用。
- 本节介绍实现一个简单的回环检测程序,利用g2o提升slam轨迹与地图的质量,得到一个完整的slam程序
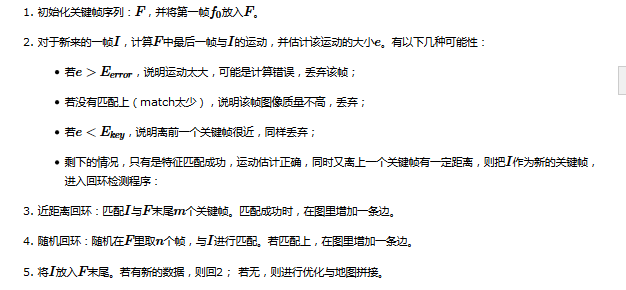
简单回环检测的流程
上一讲的程序离完整的slam还有哪些距离。主要说来有两点:
- 关键帧的提取。把每一帧都拼到地图是去是不明智的。因为帧与帧之间距离很近,导致地图需要频繁更新,浪费时间与空间。所以,我们希望,当机器人的运动超过一定间隔,就增加一个“关键帧”。最后只需把关键帧拼到地图里就行了。
- 回环的检测。回环的本质是识别曾经到过的地方。最简单的回环检测策略,就是把新来的关键帧与之前所有的关键帧进行比较,不过这样会导致越往后,需要比较的帧越多。所以,稍微快速一点的方法是在过去的帧里随机挑选一些,与之进行比较。更进一步的,也可以用图像处理/模式识别的方法计算图像间的相似性,对相似的图像进行检测。
把这两者合在一起,就得到了我们slam程序的基本流程。以下为伪码:
slam流程大体上如此
例如在线跑的话呢,可以定时进行一次优化与拼图。
或者,在成功检测到回环时,同时检测这两个帧附近的帧,那样得到的边就更多啦。
再有呢,如果要做实用的程序,还要考虑机器人如何运动,如果跟丢了怎么进行恢复等一些实际的问题呢。
实现代码
- 代码依旧是在上一讲的代码上进行更改得来的。
- 由于是完整的程序,稍微有些长,请大家慢慢看:
vim src/slam.cpp
/*************************************************************************
> File Name: rgbd-slam-tutorial-gx/part V/src/visualOdometry.cpp
> Author: xiang gao
> Mail: gaoxiang12@mails.tsinghua.edu.cn
> Created Time: 2015年08月15日 星期六 15时35分42秒
* add g2o slam end to visual odometry
* add keyframe and simple loop closure
************************************************************************/
#include <iostream>
#include <fstream>
#include <sstream>
using namespace std;
#include "slamBase.h"
#include <pcl/filters/voxel_grid.h>
#include <pcl/filters/passthrough.h>
#include <g2o/types/slam3d/types_slam3d.h>
#include <g2o/core/sparse_optimizer.h>
#include <g2o/core/block_solver.h>
#include <g2o/core/factory.h>
#include <g2o/core/optimization_algorithm_factory.h>
#include <g2o/core/optimization_algorithm_gauss_newton.h>
#include <g2o/solvers/csparse/linear_solver_csparse.h>
#include <g2o/core/robust_kernel.h>
#include <g2o/core/robust_kernel_factory.h>
#include <g2o/core/optimization_algorithm_levenberg.h>
// 把g2o的定义放到前面
typedef g2o::BlockSolver_6_3 SlamBlockSolver;
typedef g2o::LinearSolverCSparse< SlamBlockSolver::PoseMatrixType > SlamLinearSolver;
// 给定index,读取一帧数据
FRAME readFrame( int index, ParameterReader& pd );
// 估计一个运动的大小
double normofTransform( cv::Mat rvec, cv::Mat tvec );
// 检测两个帧,结果定义
enum CHECK_RESULT {NOT_MATCHED=0, TOO_FAR_AWAY, TOO_CLOSE, KEYFRAME};
// 函数声明
CHECK_RESULT checkKeyframes( FRAME& f1, FRAME& f2, g2o::SparseOptimizer& opti, bool is_loops=false );
// 检测近距离的回环
void checkNearbyLoops( vector<FRAME>& frames, FRAME& currFrame, g2o::SparseOptimizer& opti );
// 随机检测回环
void checkRandomLoops( vector<FRAME>& frames, FRAME& currFrame, g2o::SparseOptimizer& opti );
int main( int argc, char** argv )
{
// 前面部分和vo是一样的
ParameterReader pd;
int startIndex = atoi( pd.getData( "start_index" ).c_str() );
int endIndex = atoi( pd.getData( "end_index" ).c_str() );
// 所有的关键帧都放在了这里
vector< FRAME > keyframes;
// initialize
cout<<"Initializing ..."<<endl;
int currIndex = startIndex; // 当前索引为currIndex
FRAME currFrame = readFrame( currIndex, pd ); // 当前帧数据
string detector = pd.getData( "detector" );
string descriptor = pd.getData( "descriptor" );
CAMERA_INTRINSIC_PARAMETERS camera = getDefaultCamera();
computeKeyPointsAndDesp( currFrame, detector, descriptor );
PointCloud::Ptr cloud = image2PointCloud( currFrame.rgb, currFrame.depth, camera );
/*******************************
// 新增:有关g2o的初始化
*******************************/
// 初始化求解器
SlamLinearSolver* linearSolver = new SlamLinearSolver();
linearSolver->setBlockOrdering( false );
SlamBlockSolver* blockSolver = new SlamBlockSolver( linearSolver );
g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg( blockSolver );
g2o::SparseOptimizer globalOptimizer; // 最后用的就是这个东东
globalOptimizer.setAlgorithm( solver );
// 不要输出调试信息
globalOptimizer.setVerbose( false );
// 向globalOptimizer增加第一个顶点
g2o::VertexSE3* v = new g2o::VertexSE3();
v->setId( currIndex );
v->setEstimate( Eigen::Isometry3d::Identity() ); //估计为单位矩阵
v->setFixed( true ); //第一个顶点固定,不用优化
globalOptimizer.addVertex( v );
keyframes.push_back( currFrame );
double keyframe_threshold = atof( pd.getData("keyframe_threshold").c_str() );
bool check_loop_closure = pd.getData("check_loop_closure")==string("yes");
for ( currIndex=startIndex+1; currIndex<endIndex; currIndex++ )
{
cout<<"Reading files "<<currIndex<<endl;
FRAME currFrame = readFrame( currIndex,pd ); // 读取currFrame
computeKeyPointsAndDesp( currFrame, detector, descriptor ); //提取特征
CHECK_RESULT result = checkKeyframes( keyframes.back(), currFrame, globalOptimizer ); //匹配该帧与keyframes里最后一帧
switch (result) // 根据匹配结果不同采取不同策略
{
case NOT_MATCHED:
//没匹配上,直接跳过
cout<<RED"Not enough inliers."<<endl;
break;
case TOO_FAR_AWAY:
// 太近了,也直接跳
cout<<RED"Too far away, may be an error."<<endl;
break;
case TOO_CLOSE:
// 太远了,可能出错了
cout<<RESET"Too close, not a keyframe"<<endl;
break;
case KEYFRAME:
cout<<GREEN"This is a new keyframe"<<endl;
// 不远不近,刚好
/**
* This is important!!
* This is important!!
* This is important!!
* (very important so I've said three times!)
*/
// 检测回环
if (check_loop_closure)
{
checkNearbyLoops( keyframes, currFrame, globalOptimizer );
checkRandomLoops( keyframes, currFrame, globalOptimizer );
}
keyframes.push_back( currFrame );
break;
default:
break;
}
}
// 优化
cout<<RESET"optimizing pose graph, vertices: "<<globalOptimizer.vertices().size()<<endl;
globalOptimizer.save("./data/result_before.g2o");
globalOptimizer.initializeOptimization();
globalOptimizer.optimize( 100 ); //可以指定优化步数
globalOptimizer.save( "./data/result_after.g2o" );
cout<<"Optimization done."<<endl;
// 拼接点云地图
cout<<"saving the point cloud map..."<<endl;
PointCloud::Ptr output ( new PointCloud() ); //全局地图
PointCloud::Ptr tmp ( new PointCloud() );
pcl::VoxelGrid<PointT> voxel; // 网格滤波器,调整地图分辨率
pcl::PassThrough<PointT> pass; // z方向区间滤波器,由于rgbd相机的有效深度区间有限,把太远的去掉
pass.setFilterFieldName("z");
pass.setFilterLimits( 0.0, 4.0 ); //4m以上就不要了
double gridsize = atof( pd.getData( "voxel_grid" ).c_str() ); //分辨图可以在parameters.txt里调
voxel.setLeafSize( gridsize, gridsize, gridsize );
for (size_t i=0; i<keyframes.size(); i++)
{
// 从g2o里取出一帧
g2o::VertexSE3* vertex = dynamic_cast<g2o::VertexSE3*>(globalOptimizer.vertex( keyframes[i].frameID ));
Eigen::Isometry3d pose = vertex->estimate(); //该帧优化后的位姿
PointCloud::Ptr newCloud = image2PointCloud( keyframes[i].rgb, keyframes[i].depth, camera ); //转成点云
// 以下是滤波
voxel.setInputCloud( newCloud );
voxel.filter( *tmp );
pass.setInputCloud( tmp );
pass.filter( *newCloud );
// 把点云变换后加入全局地图中
pcl::transformPointCloud( *newCloud, *tmp, pose.matrix() );
*output += *tmp;
tmp->clear();
newCloud->clear();
}
voxel.setInputCloud( output );
voxel.filter( *tmp );
//存储
pcl::io::savePCDFile( "./data/result.pcd", *tmp );
cout<<"Final map is saved."<<endl;
globalOptimizer.clear();
return 0;
}
FRAME readFrame( int index, ParameterReader& pd )
{
FRAME f;
string rgbDir = pd.getData("rgb_dir");
string depthDir = pd.getData("depth_dir");
string rgbExt = pd.getData("rgb_extension");
string depthExt = pd.getData("depth_extension");
stringstream ss;
ss<<rgbDir<<index<<rgbExt;
string filename;
ss>>filename;
f.rgb = cv::imread( filename );
ss.clear();
filename.clear();
ss<<depthDir<<index<<depthExt;
ss>>filename;
f.depth = cv::imread( filename, -1 );
f.frameID = index;
return f;
}
double normofTransform( cv::Mat rvec, cv::Mat tvec )
{
return fabs(min(cv::norm(rvec), 2*M_PI-cv::norm(rvec)))+ fabs(cv::norm(tvec));
}
CHECK_RESULT checkKeyframes( FRAME& f1, FRAME& f2, g2o::SparseOptimizer& opti, bool is_loops)
{
static ParameterReader pd;
static int min_inliers = atoi( pd.getData("min_inliers").c_str() );
static double max_norm = atof( pd.getData("max_norm").c_str() );
static double keyframe_threshold = atof( pd.getData("keyframe_threshold").c_str() );
static double max_norm_lp = atof( pd.getData("max_norm_lp").c_str() );
static CAMERA_INTRINSIC_PARAMETERS camera = getDefaultCamera();
static g2o::RobustKernel* robustKernel = g2o::RobustKernelFactory::instance()->construct( "Cauchy" );
// 比较f1 和 f2
RESULT_OF_PNP result = estimateMotion( f1, f2, camera );
if ( result.inliers < min_inliers ) //inliers不够,放弃该帧
return NOT_MATCHED;
// 计算运动范围是否太大
double norm = normofTransform(result.rvec, result.tvec);
if ( is_loops == false )
{
if ( norm >= max_norm )
return TOO_FAR_AWAY; // too far away, may be error
}
else
{
if ( norm >= max_norm_lp)
return TOO_FAR_AWAY;
}
if ( norm <= keyframe_threshold )
return TOO_CLOSE; // too adjacent frame
// 向g2o中增加这个顶点与上一帧联系的边
// 顶点部分
// 顶点只需设定id即可
if (is_loops == false)
{
g2o::VertexSE3 *v = new g2o::VertexSE3();
v->setId( f2.frameID );
v->setEstimate( Eigen::Isometry3d::Identity() );
opti.addVertex(v);
}
// 边部分
g2o::EdgeSE3* edge = new g2o::EdgeSE3();
// 连接此边的两个顶点id
edge->vertices() [0] = opti.vertex( f1.frameID );
edge->vertices() [1] = opti.vertex( f2.frameID );
edge->setRobustKernel( robustKernel );
// 信息矩阵
Eigen::Matrix<double, 6, 6> information = Eigen::Matrix< double, 6,6 >::Identity();
// 信息矩阵是协方差矩阵的逆,表示我们对边的精度的预先估计
// 因为pose为6D的,信息矩阵是6*6的阵,假设位置和角度的估计精度均为0.1且互相独立
// 那么协方差则为对角为0.01的矩阵,信息阵则为100的矩阵
information(0,0) = information(1,1) = information(2,2) = 100;
information(3,3) = information(4,4) = information(5,5) = 100;
// 也可以将角度设大一些,表示对角度的估计更加准确
edge->setInformation( information );
// 边的估计即是pnp求解之结果
Eigen::Isometry3d T = cvMat2Eigen( result.rvec, result.tvec );
edge->setMeasurement( T.inverse() );
// 将此边加入图中
opti.addEdge(edge);
return KEYFRAME;
}
void checkNearbyLoops( vector<FRAME>& frames, FRAME& currFrame, g2o::SparseOptimizer& opti )
{
static ParameterReader pd;
static int nearby_loops = atoi( pd.getData("nearby_loops").c_str() );
// 就是把currFrame和 frames里末尾几个测一遍
if ( frames.size() <= nearby_loops )
{
// no enough keyframes, check everyone
for (size_t i=0; i<frames.size(); i++)
{
checkKeyframes( frames[i], currFrame, opti, true );
}
}
else
{
// check the nearest ones
for (size_t i = frames.size()-nearby_loops; i<frames.size(); i++)
{
checkKeyframes( frames[i], currFrame, opti, true );
}
}
}
void checkRandomLoops( vector<FRAME>& frames, FRAME& currFrame, g2o::SparseOptimizer& opti )
{
static ParameterReader pd;
static int random_loops = atoi( pd.getData("random_loops").c_str() );
srand( (unsigned int) time(NULL) );
// 随机取一些帧进行检测
if ( frames.size() <= random_loops )
{
// no enough keyframes, check everyone
for (size_t i=0; i<frames.size(); i++)
{
checkKeyframes( frames[i], currFrame, opti, true );
}
}
else
{
// randomly check loops
for (int i=0; i<random_loops; i++)
{
int index = rand()%frames.size();
checkKeyframes( frames[index], currFrame, opti, true );
}
}
}
代码注解:
回环检测是很怕"false positive"的,即“将实际上不同的地方当成了同一处”,这会导致地图出现明显的不一致。所以,在使用g2o时,要在边里添加"robust kernel",保证一两个错误的边不会影响整体结果。
我在slambase.h里添加了一些彩色输出代码。运行此程序时,出现绿色信息则是添加新的关键帧,红色为出错。
parameters.txt里定义了检测回环的一些参数:
#part 7
keyframe_threshold=0.1
max_norm_lp=5.0
# Loop closure
check_loop_closure=yes
nearby_loops=5
random_loops=5
- 其中,nearby_loops就是m,random_loops就是n啦。
- 这两个数如果设大一些,匹配的帧就会多,不过太大了就会影响整体速度了呢。
回环检测的效果
- 对代码进行编译,然后bin/slam即可看到程序运行啦。
- 添加了回环检测之后呢,g2o文件就不会像上次那样孤零零的啦,看起来是这样子的:

- 是不是感觉整条轨迹“如丝般顺滑”了呢?它不再是上一讲那样一根筋通到底,而是有很多帧间的匹配数据,保证了一两帧出错能被其他匹配数据给“拉回来”。
- 百度云上的数据最后拼出来是这样的哦(780帧,关键帧62张,帧率5Hz左右):

- 咖啡台左侧有明显的人通过的痕迹,导致地图上出现了他的身影:

- 这个就可以算作是基本的地图啦。
- 至此,slam的两大目标:“轨迹”和“地图”我们都已得到了,可以算是基本上解决了这个问题了。
后话:
- slam仍是一个开放的问题,尽管有人曾说“在slam领域发文章越来越难”,然而现在机器人几大期刊和会议(IJRR/TRO/RAM/JFD/ICRA/IROS...)仍有不少slam方面的文章。虽然我们“获取轨迹与地图”的目标已基本实现。
- 但仍有许多工作等我们去做,包括:
- 更好的数学模型(新的滤波器/图优化理论);
- 新的视觉特征/不使用特征的直接方法;
- 动态物体/人的处理;
- 地图描述/点云地图优化/语义地图
- 长时间/大规模/自动化slam
参考:
- 本讲代码:https://github.com/gaoxiang12/rgbd-slam-tutorial-gx/tree/master/part%20VII
- 数据:http://yun.baidu.com/s/1i33uvw5
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号