



















一起做RGB-D SLAM (5)-Visual Odometry (视觉里程计)
一起做RGB-D SLAM (5)-Visual Odometry (视觉里程计)
说明:
- 上节介绍两张图像间的匹配与运动估计
- 本节介绍视频流处理,完成一个视觉里程计(visual odometry)的编写
测试数据:
- 网盘:http://yun.baidu.com/s/1i33uvw5 (400多M)
- 打开这个数据集,你会看到里头有 和 两个文件夹,分别是RGB图与深度图。
- 前几讲的数据也是取自这里.
- 取自nyuv2数据集:http://cs.nyu.edu/~silberman/datasets/nyu_depth_v2.html
- 这可是一个国际上认可的,相当有名的数据集哦。
- 如果你想要跑自己的数据,当然也可以,不过需要你进行一些预处理啦
视觉里程计
- 什么是视觉里程计呢?
- 简而言之,就是把新来的数据与上一帧进行匹配,估计其运动,然后再把运动累加起来的东西。
- 画成示意图的话,就是下面这个样子:
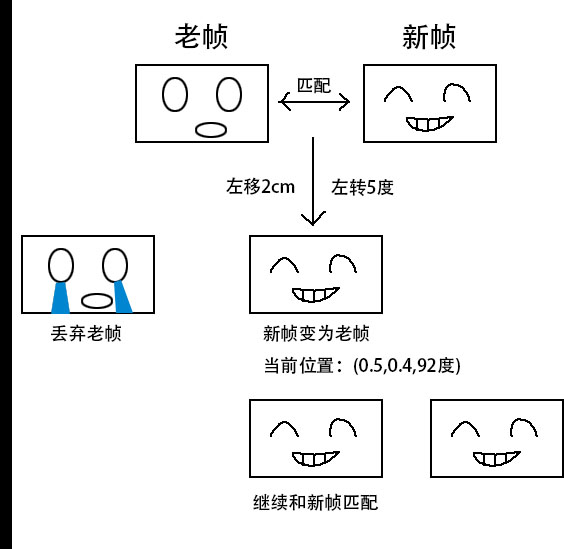
- 这实际上和滤波器很像,通过不断的两两匹配,估计机器人当前的位姿,过去的就给丢弃了。
- 这个思路比较简单,实际当中也比较有效,能够保证局部运动的正确性。
- 下面我们来实现一下visual odometry
函数封装:
- 首先工具函数:将cv的旋转矢量与位移矢量转换为变换矩阵,类型为Eigen::Isometry3d
- 编辑文件:
vim src/slamBase.cpp - 代码如下:
// cvMat2Eigen
Eigen::Isometry3d cvMat2Eigen( cv::Mat& rvec, cv::Mat& tvec )
{
cv::Mat R;
cv::Rodrigues( rvec, R );
Eigen::Matrix3d r;
cv::cv2eigen(R, r);
// 将平移向量和旋转矩阵转换成变换矩阵
Eigen::Isometry3d T = Eigen::Isometry3d::Identity();
Eigen::AngleAxisd angle(r);
Eigen::Translation<double,3> trans(tvec.at<double>(0,0), tvec.at<double>(0,1), tvec.at<double>(0,2));
T = angle;
T(0,3) = tvec.at<double>(0,0);
T(1,3) = tvec.at<double>(0,1);
T(2,3) = tvec.at<double>(0,2);
return T;
}
- 另一个函数:将新的帧合并到旧的点云里:
// joinPointCloud
// 输入:原始点云,新来的帧以及它的位姿
// 输出:将新来帧加到原始帧后的图像
PointCloud::Ptr joinPointCloud( PointCloud::Ptr original, FRAME& newFrame, Eigen::Isometry3d T, CAMERA_INTRINSIC_PARAMETERS& camera )
{
PointCloud::Ptr newCloud = image2PointCloud( newFrame.rgb, newFrame.depth, camera );
// 合并点云
PointCloud::Ptr output (new PointCloud());
pcl::transformPointCloud( *original, *output, T.matrix() );
*newCloud += *output;
// Voxel grid 滤波降采样
static pcl::VoxelGrid<PointT> voxel;
static ParameterReader pd;
double gridsize = atof( pd.getData("voxel_grid").c_str() );
voxel.setLeafSize( gridsize, gridsize, gridsize );
voxel.setInputCloud( newCloud );
PointCloud::Ptr tmp( new PointCloud() );
voxel.filter( *tmp );
return tmp;
}
- 在parameters.txt中,我们增加了几个参数,以便调节程序的性能:
# part 5
# 数据相关
# 起始与终止索引
start_index=1
end_index=700
# 数据所在目录
rgb_dir=../data/rgb_png/
rgb_extension=.png
depth_dir=../data/depth_png/
depth_extension=.png
# 点云分辨率
voxel_grid=0.02
# 是否实时可视化
visualize_pointcloud=yes
# 最小匹配数量
min_good_match=10
# 最小内点
min_inliers=5
# 最大运动误差
max_norm=0.3
- 前面几个参数是相当直观的:指定RGB图与深度图所在的目录,起始与终止的图像索引(也就是第1张到第700张的slam啦)。
- 后面几个参数,会在后面进行解释。
实现VO
- 最后,利用之前写好的工具函数,实现一个VO:
vim src/visualOdometry.cpp - 代码如下:
/*************************************************************************
> File Name: rgbd-slam-tutorial-gx/part V/src/visualOdometry.cpp
> Author: xiang gao
> Mail: gaoxiang12@mails.tsinghua.edu.cn
> Created Time: 2015年08月01日 星期六 15时35分42秒
************************************************************************/
#include <iostream>
#include <fstream>
#include <sstream>
using namespace std;
#include "slamBase.h"
// 给定index,读取一帧数据
FRAME readFrame( int index, ParameterReader& pd );
// 度量运动的大小
double normofTransform( cv::Mat rvec, cv::Mat tvec );
int main( int argc, char** argv )
{
ParameterReader pd;
int startIndex = atoi( pd.getData( "start_index" ).c_str() );
int endIndex = atoi( pd.getData( "end_index" ).c_str() );
// initialize
cout<<"Initializing ..."<<endl;
int currIndex = startIndex; // 当前索引为currIndex
FRAME lastFrame = readFrame( currIndex, pd ); // 上一帧数据
// 我们总是在比较currFrame和lastFrame
string detector = pd.getData( "detector" );
string descriptor = pd.getData( "descriptor" );
CAMERA_INTRINSIC_PARAMETERS camera = getDefaultCamera();
computeKeyPointsAndDesp( lastFrame, detector, descriptor );
PointCloud::Ptr cloud = image2PointCloud( lastFrame.rgb, lastFrame.depth, camera );
pcl::visualization::CloudViewer viewer("viewer");
// 是否显示点云
bool visualize = pd.getData("visualize_pointcloud")==string("yes");
int min_inliers = atoi( pd.getData("min_inliers").c_str() );
double max_norm = atof( pd.getData("max_norm").c_str() );
for ( currIndex=startIndex+1; currIndex<endIndex; currIndex++ )
{
cout<<"Reading files "<<currIndex<<endl;
FRAME currFrame = readFrame( currIndex,pd ); // 读取currFrame
computeKeyPointsAndDesp( currFrame, detector, descriptor );
// 比较currFrame 和 lastFrame
RESULT_OF_PNP result = estimateMotion( lastFrame, currFrame, camera );
if ( result.inliers < min_inliers ) //inliers不够,放弃该帧
continue;
// 计算运动范围是否太大
double norm = normofTransform(result.rvec, result.tvec);
cout<<"norm = "<<norm<<endl;
if ( norm >= max_norm )
continue;
Eigen::Isometry3d T = cvMat2Eigen( result.rvec, result.tvec );
cout<<"T="<<T.matrix()<<endl;
//cloud = joinPointCloud( cloud, currFrame, T.inverse(), camera );
cloud = joinPointCloud( cloud, currFrame, T, camera );
if ( visualize == true )
viewer.showCloud( cloud );
lastFrame = currFrame;
}
pcl::io::savePCDFile( "data/result.pcd", *cloud );
return 0;
}
FRAME readFrame( int index, ParameterReader& pd )
{
FRAME f;
string rgbDir = pd.getData("rgb_dir");
string depthDir = pd.getData("depth_dir");
string rgbExt = pd.getData("rgb_extension");
string depthExt = pd.getData("depth_extension");
stringstream ss;
ss<<rgbDir<<index<<rgbExt;
string filename;
ss>>filename;
f.rgb = cv::imread( filename );
ss.clear();
filename.clear();
ss<<depthDir<<index<<depthExt;
ss>>filename;
f.depth = cv::imread( filename, -1 );
return f;
}
double normofTransform( cv::Mat rvec, cv::Mat tvec )
{
return fabs(min(cv::norm(rvec), 2*M_PI-cv::norm(rvec)))+ fabs(cv::norm(tvec));
}
FRAME readFrame( int index, ParameterReader& pd ) 是读取帧数据的函数。告诉它我要读第几帧的数据,它就会乖乖的把数据给找出来,返回一个FRAME结构体。
在得到匹配之后,我们判断了匹配是否成功,并把失败的数据丢弃。为什么这样做呢?
因为之前的算法,对于任意两张图像都能做出一个结果。对于无关的图像,就明显是不对的。所以要去除匹配失败的情形。
如何检测匹配失败呢?我们采用了三个方法:
- 去掉goodmatch太少的帧,最少的goodmatch定义为:
min_good_match=10 - 去掉solvePnPRASNAC里,inlier较少的帧,同理定义为:
min_inliers=5 - 去掉求出来的变换矩阵太大的情况。因为假设运动是连贯的,两帧之间不会隔的太远:
max_norm=0.3
- 去掉goodmatch太少的帧,最少的goodmatch定义为:

- 经过这三道工序处理后,vo的结果基本能保持正确啦。图示:

提示:
- 当点云出现时,可按5显示颜色,然后按r重置视角,快速查看点云;
- 可以调节parameters.txt中的voxel_grid值来设置点云分辨率。0.01表示每1cm3
的格子里有一个点 - 如果在编译时期出现Link错误,请检查你是否链接到了PCL的visualization模块。如果实在不确定,就照着github源码抄一遍。
- 在运动时期,由于存在两张图像完全一样的情况,导致匹配时距离为0。由于本节程序的设置,这种情况会被当成没有匹配,导致VO丢失。请你自己fix一下这个bug,我在下一节当中也进行了检查。
参考:
- 本讲代码:https://github.com/gaoxiang12/rgbd-slam-tutorial-gx/tree/master/part%20V
- 数据链接:http://yun.baidu.com/s/1i33uvw5
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号