



















Turtlebot机械臂入门教程-配置舵机
Turtlebot机械臂入门教程-配置舵机
说明
- 介绍为舵机分配正确的ID
- 介绍如何为驱动板接上电源并验证工作正常
- 介绍如何测试机械臂
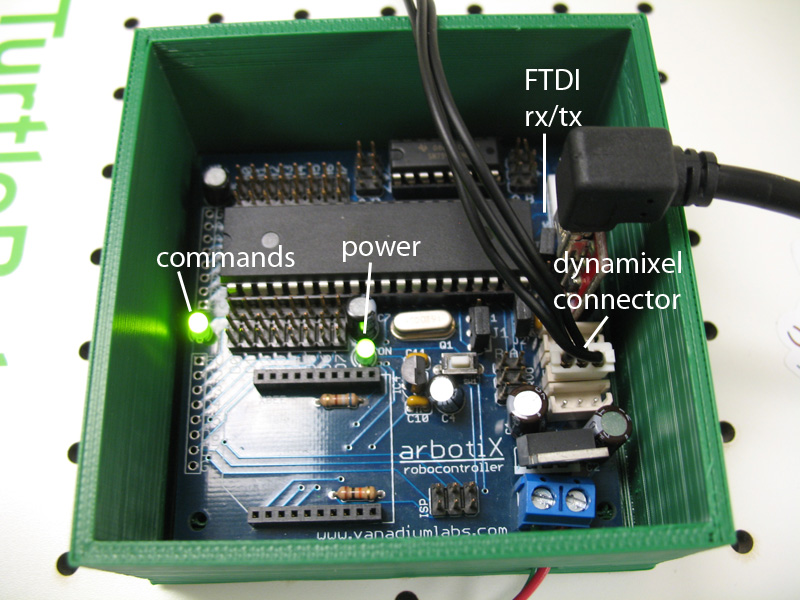
驱动板接上电源(针对turtelbot1)
- 驱动板电源口连接到turtlebot的电源板
- 舵机线连接到驱动板伺服连接口
- 驱动板通过FTDI USB线连接到计算机
- 确保插入iRobot Create线之后再插入FTDI USB线
- 接下来,从turtlebot_dashboard打开正确的断路器(断路器1或2)。你应该看到红色的LED闪烁。
- 图示:
分配舵机ID
安装ArbotiX固件方法1,点击查看安装教程
安装ArbotiX固件方法2
sudo avrdude -p m644p -c avrisp2 -P usb -U flash:w:ros.hex
- 也可以使用OpenCM 9.04 板来控制机械臂
配置舵机
- 一般程序是一个一个处理,先断开每个舵机连接线,然后再每步连接新的舵机
- 从底座到抓手,重新命名
- 舵机的ID和名称如图:
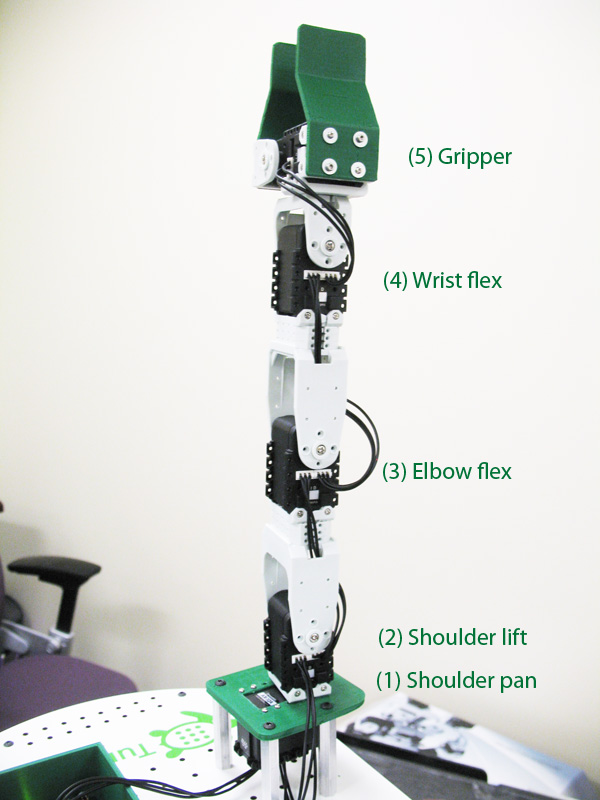
- 每个舵机默认ID是1,所以要使用舵机,就要重新设置ID。
- 最简单的方式通过USB线把ArbotiX和PC连接起来,利用Arbotix的终端程序,一个个设置。
- 启动Arbotix的终端程序,利用PyPose, 运行PyPose.py。在上网本执行
cd ~
git clone https://github.com/vanadiumlabs/pypose
cd pypose
./PyPose.py
打开一个PyPose窗口,如图:
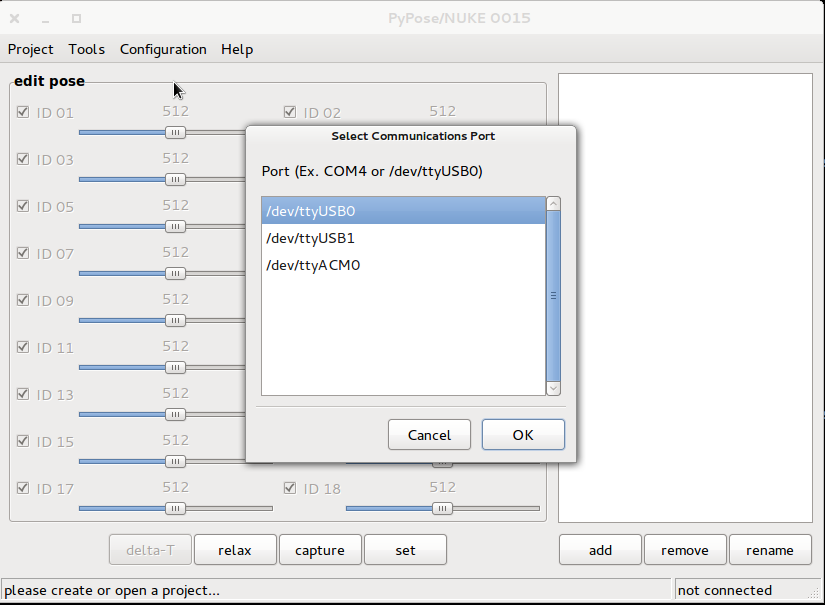
点击 Configuration -> port,配置端口, 选择正确端口,比如/dev/ttyUSB1
点击 tools -> terminal ,类似Linux的终端窗口
输入/s可以输出每个舵机ID和名称
如果增加新的舵机,输入/s,会显示是1
使用命令 mv old_id new_id 就可以定义新的ID,如:
mv 1 2
- 最后分配完显示:
Arm Servos (from base to gripper)
ID 1 = Shoulder pan
ID 2 = Shoulder lift
ID 3 = Elbow flex
ID 4 = Wrist flex
ID 5 = Gripper
- 注意:是每次单独接入舵机。如果同时有两个相同的ID,是无法正常工作的。
测试机械臂
- 为测试,需要启动turtlebot_arm包和遥控机械臂,在上网本执行命令:
roslaunch turtlebot_arm_bringup arm.launch
- 显示:
[INFO] [WallTime: 1312416101.995488] Started ArbotiX connection on port /dev/ttyUSB1.
- 利用arbotix_python包的GUI界面来控制机械臂,在工作机运行命令:
rosrun arbotix_python controllerGUI.py
你可以单独操纵每个关节,如图:
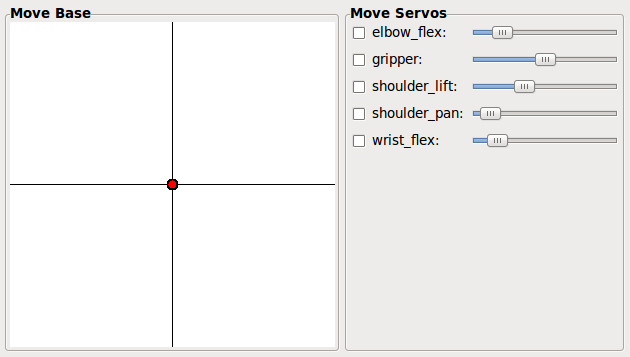
勾选复选框则操作,拉动滑动条就可以移动机械臂,取消勾选则释放。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号