



















Pixhawk无人机教程-3.5 强制硬件配置
强制硬件配置
作为初次安装的一部分,你需要使用Mission Planner配置一些必要的硬件组件。这些说明描述了选择机架方向与配置遥控发射机接收机、罗盘、加速度计的过程。
目录
- 强制硬件配置
- 选择机架类型
- 校准罗盘
- 校准加速度计
- 校准遥控
- 配置附加硬件(可选)
选择机架类型
在Mission Planner的“硬件”屏幕选择 Mandatory Hardware > Frame Type。选择用于你的飞行器的机架。默认配置为X。如果你想让一条机臂单独朝向前方,选择Plus(+)配置。对于三轴飞行器、传统直升机与Y6,机架类型是被忽略的。
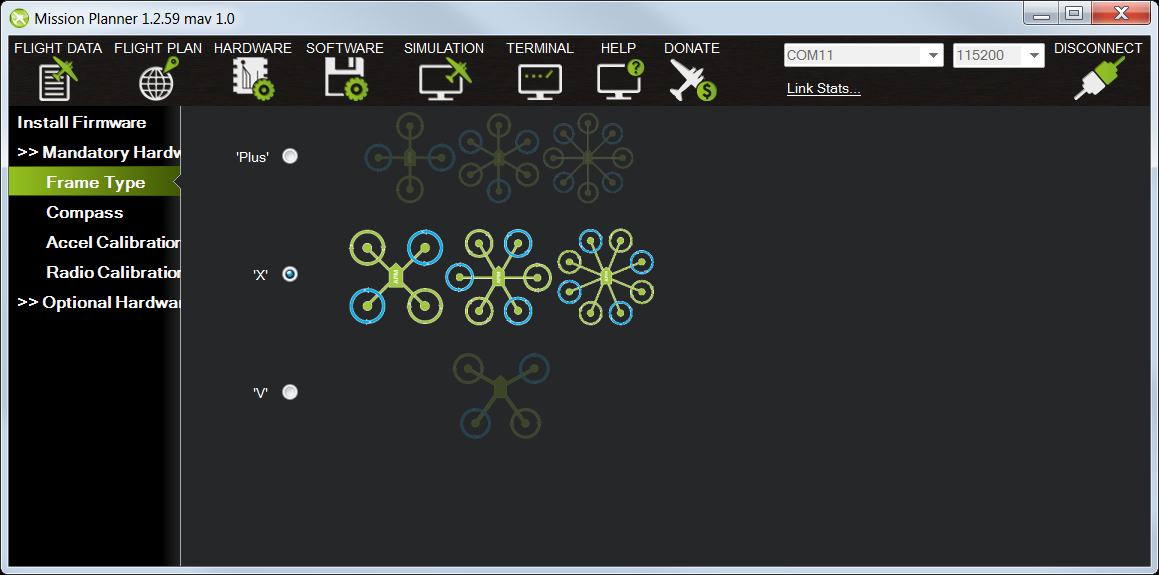
(对于H型机架四轴飞行器在Advanced Parameter Tab中使用选项将机架类型设为‘3’。为了应用H型机架结构,交换左后方与右后方螺旋桨,并反转这两个电机旋转方向(通过交换任意两根电机导线)。对前面两个电机重复相同的步骤。)
校准罗盘
执行基本罗盘校准,你需要:
在 > Mandatory Hardware之下,选择Compass
确保Enable与AutoDec多选框已被选中
点击“Live Calibration”按钮

一个窗口将会弹出,提示你有60秒时间将APM/PX4围绕所有轴旋转,点击“OK”
一个倒计时窗口将会出现,显示mission planner正在收集罗盘数据
在这接下来的60秒中,你应该拿住飞行器在空中,然后慢慢地旋转它,以使每一侧(前,后,左,右,上,下)依次朝向地面几秒钟。

在结束的时候,另一个窗口会弹出,显示给你新的计算出的补偿值。如果所有三个值在-150到150之间,说明补偿是正常的。点击“OK”。
查看这个视频,是一个执行罗盘校准的示例。有关于此的更多细节与其他罗盘设置步骤 “compassmot”可以在这里找到。有关磁干扰与减轻它的方法的综合讨论可以在这里找到。
校准加速度计
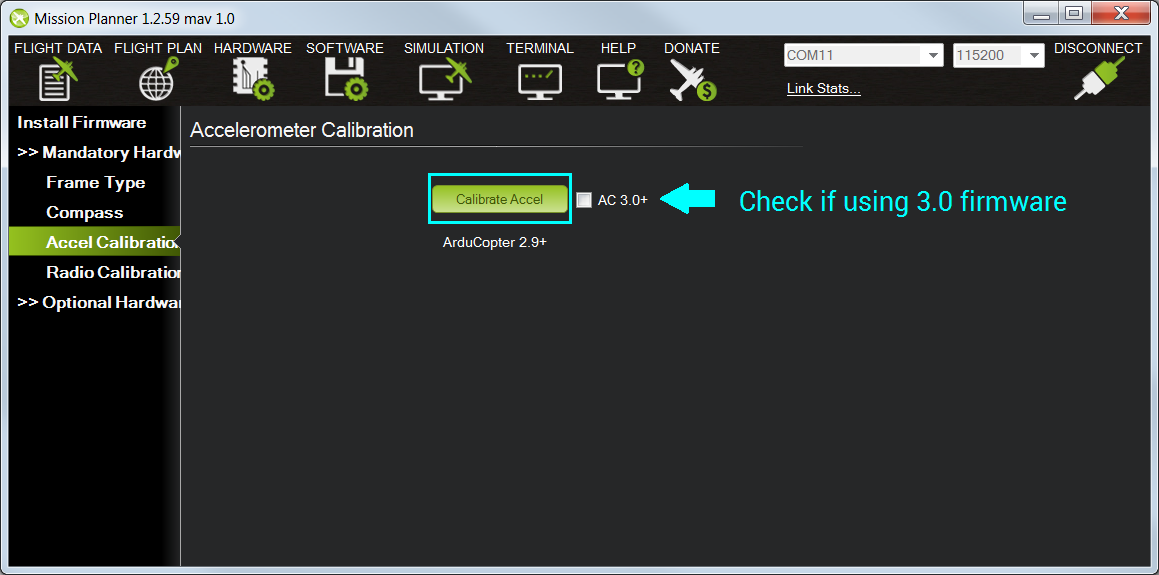
从左侧菜单中在Mandatory Hardware下,选择Accel Calibration。如果你正使用ArduCopter Code 3.0,务必勾选AC 3.0+复选框。如果你在使用2.9.1b(或更早版本),保持复选框未勾选状态。此过程需要你依次按下图所示放置飞行器。水平位置得到正确的结果是最重要的,这将会成为你的控制器看作飞行时的水平的姿态。重点在于在每步按下按钮之后不要立即移动飞行器。关于如何拿住飞行器的示例请查看这个视频。

当你准备好执行校准时,选择Calibrate Accel。
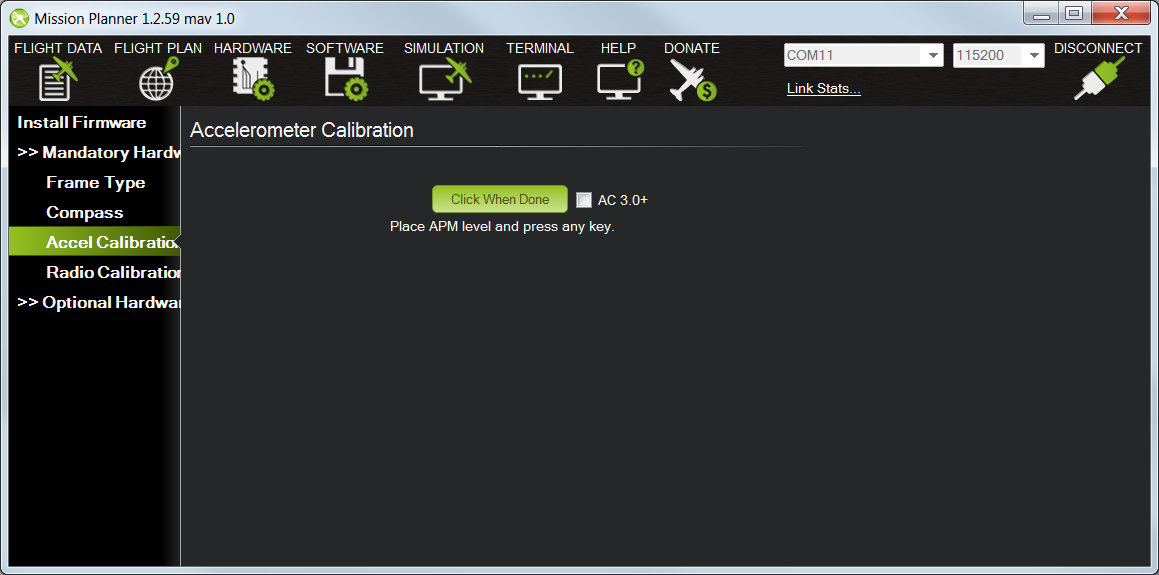
Mission Planner会提示你把你的飞行器放置在每个校准位置并按下任意按钮。使其通过必要的位置。(使用Click When Done按钮是没有必要的。)
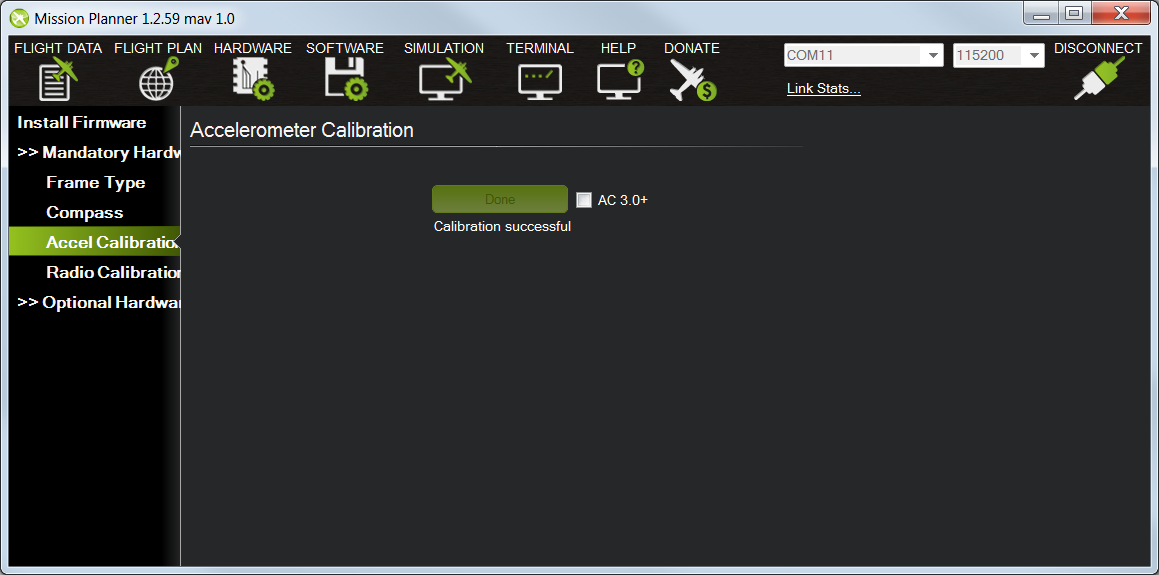
当你完成了校准过程,Mission Planner会显示“Calibration Successful!”(校准成功!)如下图所示。
校准遥控
打开发射机。请确认发射机为飞机(Airplane)模式(APM不论驾驶的平台种类如何,都需要飞机模式)并且所有微调需要置中。
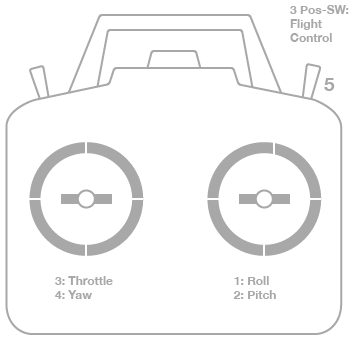
对于日本手发射机,左摇杆用来控制pitch和yaw,右摇杆控制油门和roll。
对于美国手发射机,左摇杆用来控制油门和yaw,右摇杆控制pitch和roll。
对于这两种发射机,发射机的三段开关应附属于通道5,它将控制飞行模式。
可选地,发射机的旋钮应控制通道6用于飞行中调试。通道7与通道8开关可用于控制辅助功能。
在Mission Planner中,点击窗口右下方的绿色的“Calibrate Radio”按钮。Mission Planner会弹出一个对话框来确认遥控设备是打开的,电池没有连接,并且螺旋桨没有安装。点击OK。
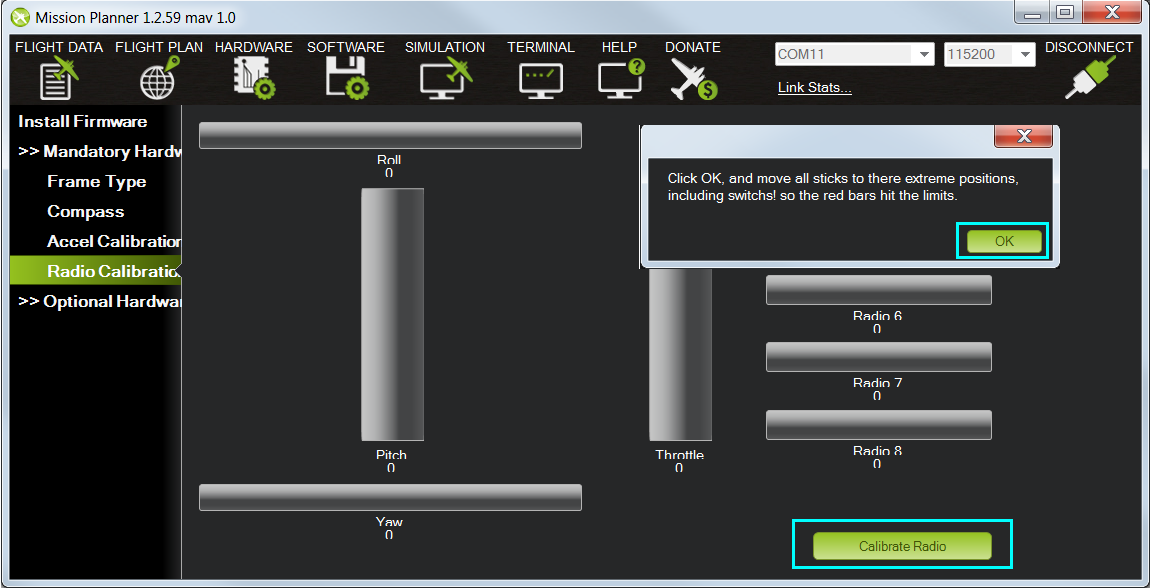
点击OK;在你的发射机上移动控制摇杆并拨动开关到它们的行程极限,观察无线校准条上的结果。红线会显示在校准条上标明最大最小值。拨动通道5与通道6的扭子开关通过它们的位置范围(通道7与通道8在基本操作中不需要使用)。
你的发射机应能引起下列控制变化:
通道1: 低 = roll 向左,高 = roll 向右。
通道2: 低 =pitch向前,高=pitch向后。
通道3: 低 =油门减(关),高=油门加。
通道4: 低 = yaw向左,高 = yaw向右。
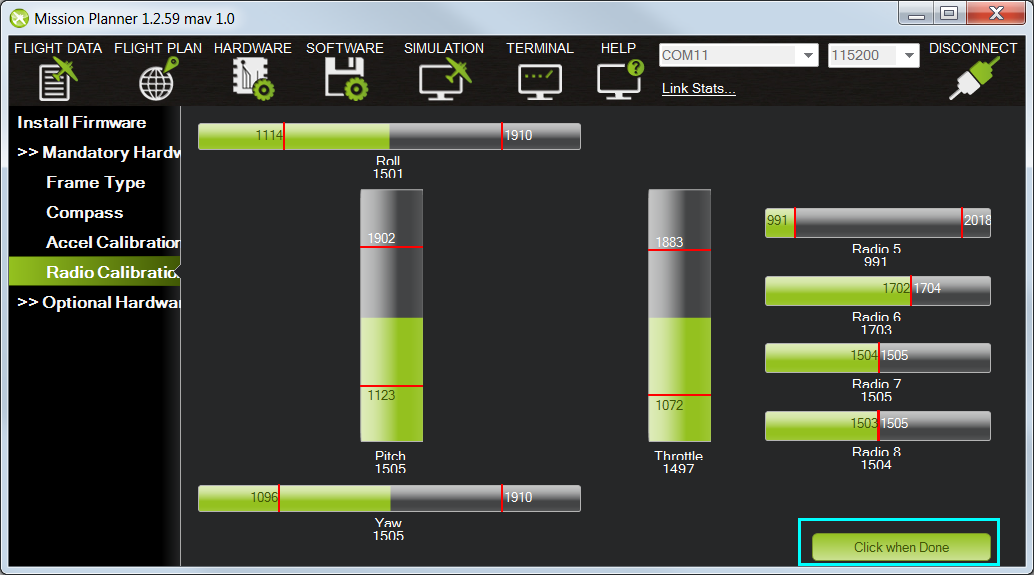
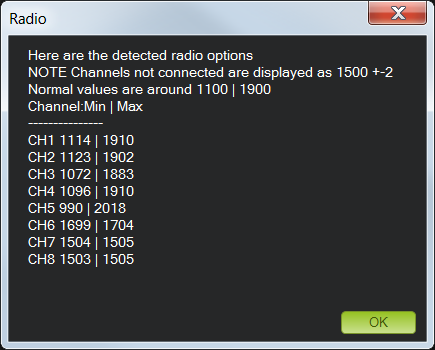
当roll,pitch,油门,yaw,还有通道5 (与可选的通道6)上的红条设定到了最大和最小的位置上,选择Click when Done。Mission Planner会显示校准数据的摘要信息。一般数值在最小1100,最大1900左右。
配置附加硬件(可选)
可选硬件配置,有关电池监控,声呐,空速传感器,光流,OSD,相机云台,天线跟踪在可选硬件wiki页面有详细介绍。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号