



















Pixhawk无人机教程-3.1.1 连接你的遥控输入和电机(APM2)
连接你的遥控输入和电机(APM)
目录
- 连接你的遥控输入和电机
- 连接你的遥控输入
- 连接遥控器输出端到电机
- 辨认顺时针和逆时针旋转的螺旋桨
- 检查电机转动方向的简单方法
- 使用CLI检查电机转动方向
连接你的遥控输入

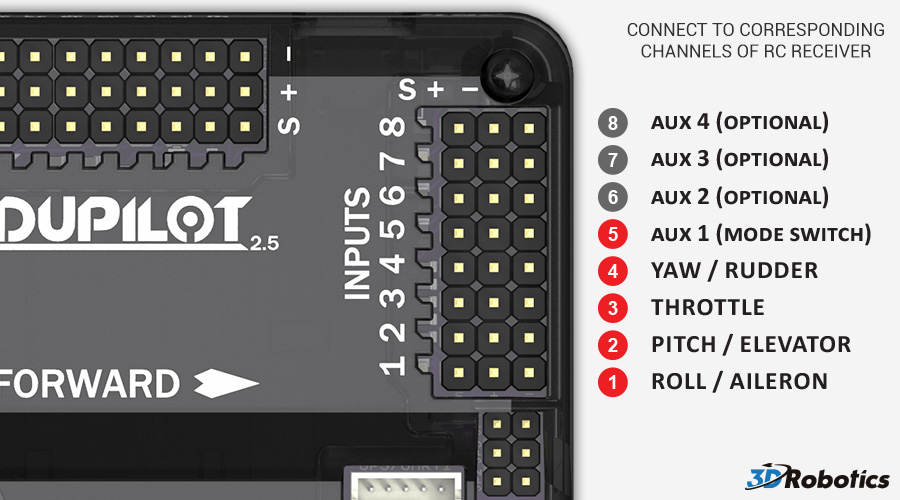
将你的遥控接收器的“S”(信号)线连接到APM输入端的“S”型引脚,使用 跳接线 连接APM:Copter 套件。 您至少要连接1〜5通道。 6〜8通道是可选的。 你的遥控接收器需要通电。 通常是用一根2线或者3线的线连接APM的Inputs和一个接收机的输出通道。 请看 APM电源详细 的限制和重要警告。
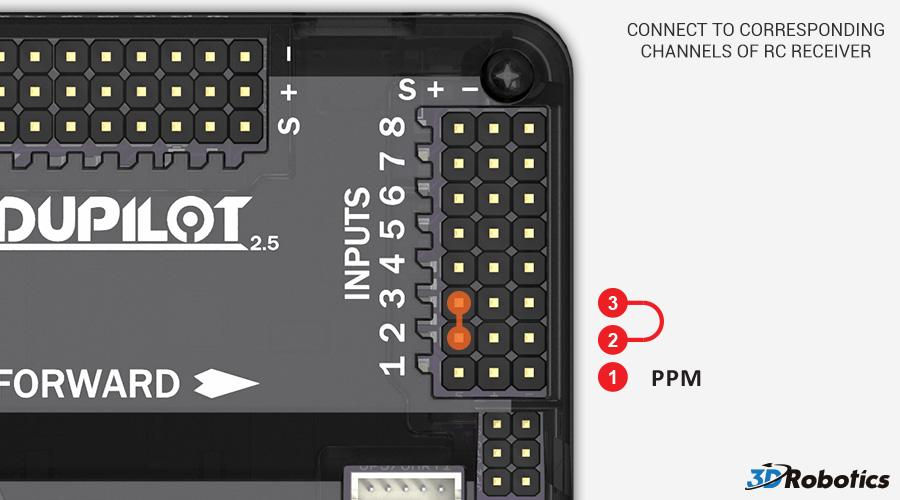
假如你使用的是 PPM 接收机, 用一个 跳线 插在通道2和3的“S”信号输入端,并连接PPM到1通道。
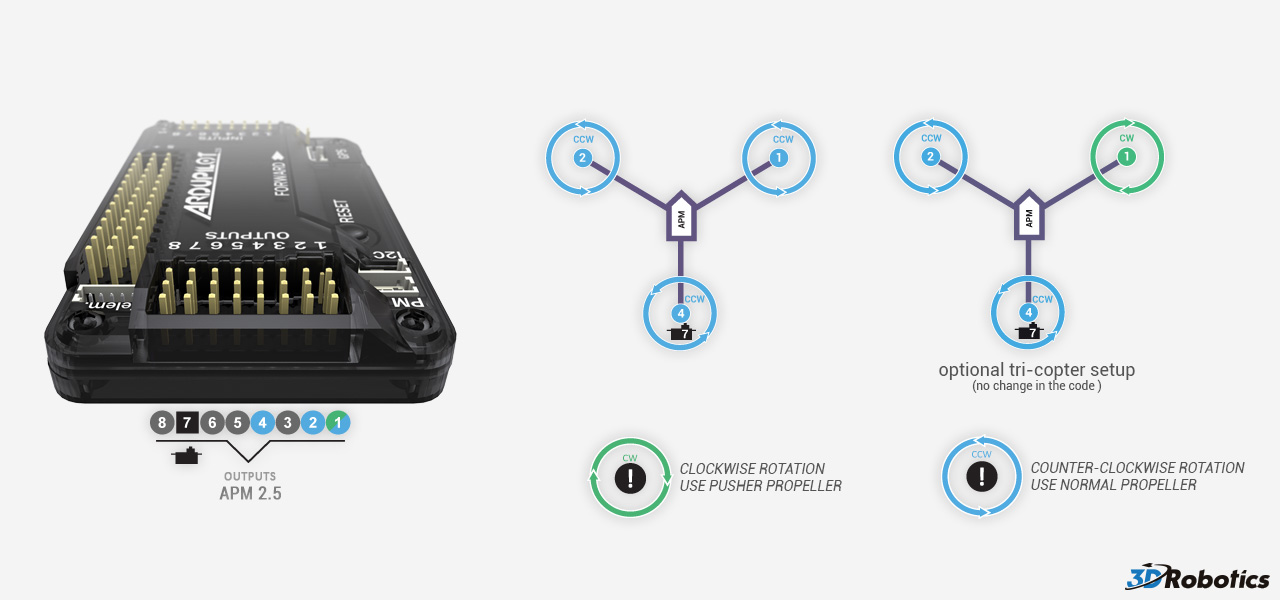
连接遥控器输出端到电机
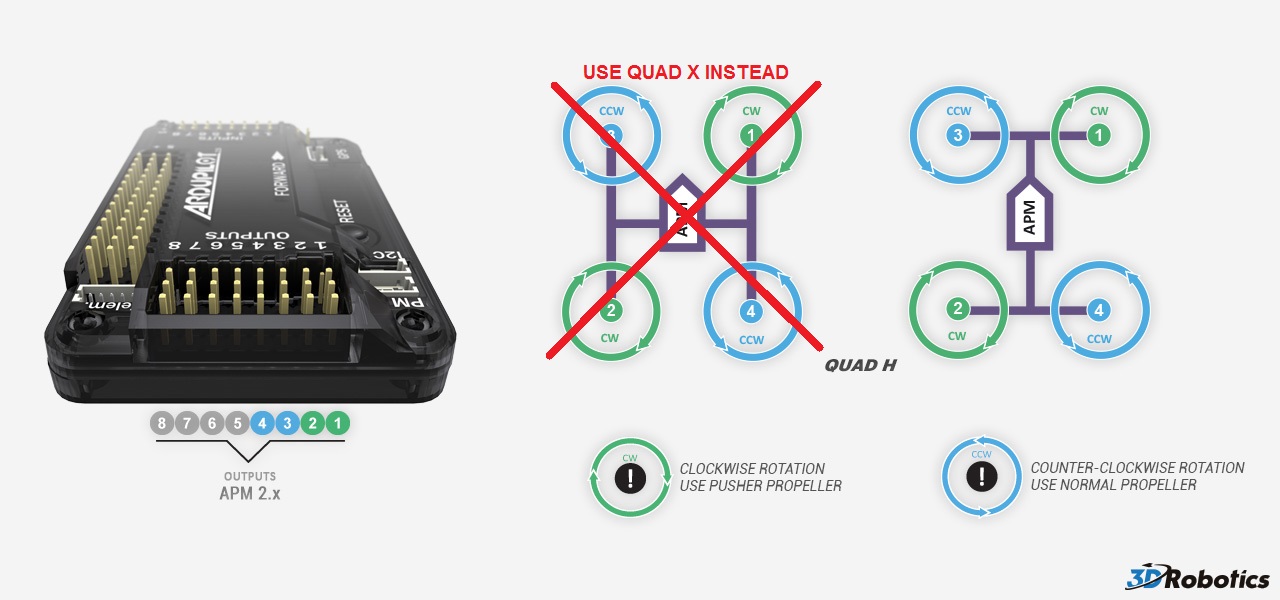
连接你电调板(PDB)上的4线或者6线连接到apm输出端相应的“S”引脚。 这没有必要连接+5v或者接地引脚-这些都在你的PDB上进行。
注意: 在组装PDB信息里面找到 Quad and Hexa。



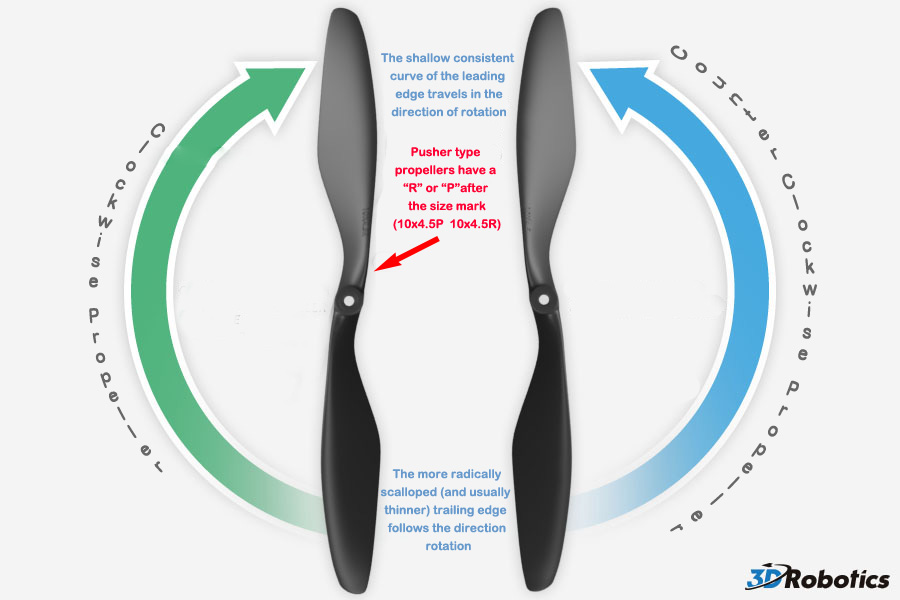
辨认顺时针和逆时针旋转的螺旋桨
虽然可能相当明显,可以使用下面的图片来识别螺旋桨的方向,以便可以正确连接电机。
注意:
- 不是所有的螺旋桨都标有R或P所以你可能需要通过观察螺旋桨本身来确定旋转方向。
- 现如今正浆和反浆,可同时顺时针和逆时针旋转。
- 注意,上方的螺旋桨在旋转方向的前缘为平滑的曲线。
- 更突出的扇形(通常是较薄的那边)作为后缘,
- 这是正常的。你可以使用这些特征来确定螺旋桨正确的旋转方向。
你也必须根据需要恰当的使用正桨和反桨。
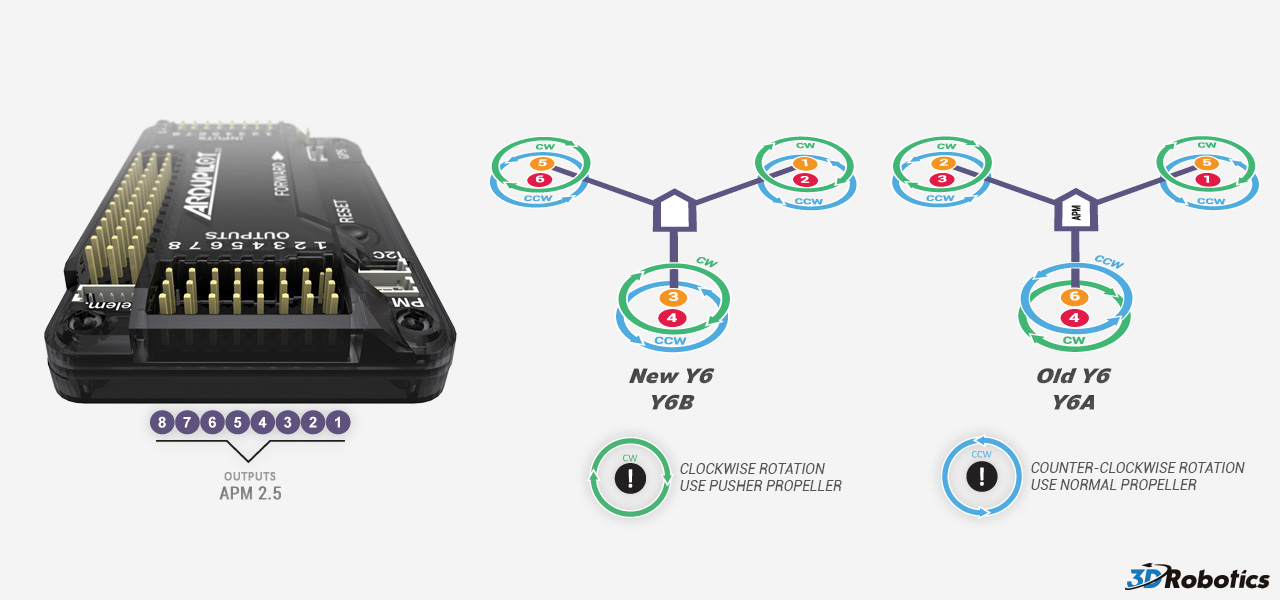
- 我们大部分“传统”的多旋翼使用正浆
- 但是在Y6模式或x8模式飞行器上下面的电机要求用反桨。
- 普通三轴, 四轴, 六轴和八轴一样也可以用反浆。
- 底线是你需要给你的飞行器安装正确类型和旋转的螺旋桨,并正确地安装它们。
- 使用高质量的桨和做静态平衡的桨它们将提高性能和飞行时间,并减少震动。
检查电机转动方向的简单方法
- 如果你已经完成了 遥控器 和 ESC 校准,你可以检查你电机的旋转方向的修正:
注意: 电机转动方向是简单地通过互换其中的两根电源线,以达到电机转动方向的逆转。 - 按住你的飞行器并确保你的身体的安全,解锁ESCs (对于PX4系统,按下并放开解锁键)向右按住你的油门四秒。
- 之后轻轻推一点油门,直到电机开始转动。 注意每一个电机的转动的方向。
- 将转动所显示的方向与上面的图片所显示的方向做对比。
- 任何电机方向旋转错误简单的扭转三个中的两个电机的电源输入线。
使用CLI检查电机转动方向
- 另一种检查电机已连接正确的方法是在CLS里用“Motors”命令。
注意: 通过简单互换电机电源线三根中的两根来逆转电机转动方向。
- 使用USB连接线将APM或PX4连接到您的电脑
连接锂电池
打开任务规划器的终端窗口,然后按“连接到APM”或“连接到PX4”按钮
在PX4按安全开关
出现提示时
键入 Test
键入 motors电机现在以非常低的油门按顺序旋转,每个电机旋转约1秒钟,然后停止。
2或3秒的延迟后下一个电机转将开始。
请注意每台电机的旋转方向,因为电机旋转是一个接一个。
‘+’结构的情况第一个旋转的电机是位于正前方,或是在‘X’结构的情况第一个电机在右前方电机测试将继续进行顺时针旋转。
- 在x8的情况下,它会先旋转右边顶部的电机,然后右边下面的电机,然后继续围绕着同一个模式。
- OctoV将旋转右前电机,然后再继续顺时针直到到达左前电机。
- 测试模式完成后,再重新开始之前有4-5秒停顿。
当你满意并且电机转动正确时:
- 按任意键(这个过程不会停止,直到它完成当前的序列)
- 断开主电机电池
- 断开USB电缆
- 任何电机方向旋转错误简单的扭转三个中的两个电机的电源输入线。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号