



















Pixhawk无人机教程-2.4 快速入门指南
快速入门指南
本指南是入门的快捷路径,用于完全组装好了APM:Copters并且固件已经加载到APM的用户,比如3D Robotics到手飞多旋翼飞行器。如果你以多旋翼飞行器套件开始,比如3D Robotics DIY套件,那么使用First Time Setup操作指南代替本指南。
目录
- 安装Mission Planner
- Connect RC receiver
- Attach propellers
- Pre-flight information
- Next steps
1. 安装Mission Planner
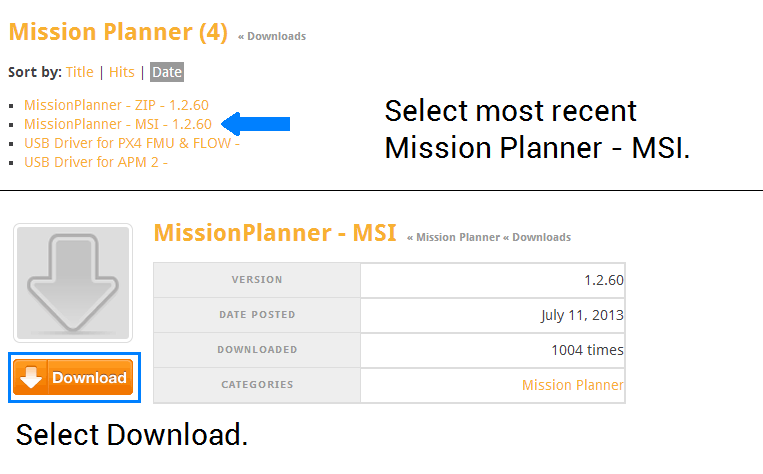
请到Mission Planner下载页面,然后选择最新的Mission Planner MSI。点击上述链接,会引导你到下载页面。点击下载保存安装文件到你的计算机。
打开刚下载的微软安装文件(.msi)并选择运行来运行安装程序。

跟随提示完成安装过程。安装程序会自动安装所有必要的软件驱动。如果你收到DirectX安装错误,请在 DirectX下载中心更新你的DirectX插件。如果你收到如下图的警告,选择无论如何都要安装这个驱动软件来继续。

安装完成后,打开Mission Planner。Mission Planner会自动提示你有关可用更新。请保持你的Mission Planner版本最新。
2. 连接遥控接收机
你的遥控接收机是否已经连接并配置?如果没有,跟随下面的说明完成。
对于PWM遥控信号,使用连接线把遥控接收机连接到APM输入信号针脚,通道1连接到APM上标记为1号的信号针脚,通道2到信号针脚2,以此类推。你也需要为接收机提供电源,通过3P杜邦线连接接收机与APM中的一个通道。

对于PPM(所有通道共用一条线),使用PPM跳线帽连接APM上的输入信号针脚2和针脚3,在接收机上连接信号针脚3和针脚4。使用一条3P杜邦线连接信号、电源、地线针脚,从接收机上的通道1到APM上标记为1的三个针脚。接收机上的针脚定义在不同型号的接收机上是不同的,所以请翻阅你的接收机文档上关于PPM配置的章节。

在你的地面站计算机上下载好Mission Planner后,连接APM到你的计算机,你需要使用Micro USB连接线连接到APM的Micro USB接口。请将USB接口直接连到你的计算机上,不要使用USB hub。

Windows会自动detect APM and安装正确的驱动软件。如果你收到提示说“未找到驱动”,跟随这些操作说明来手动下载软件。
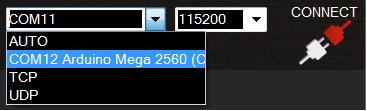
接下来我们要让Mission Planner知道哪个端口是我们用来连接APM的。打开Mission Planner,使用屏幕右上角的下拉菜单(在Connect按钮旁边)来连接APM。如图所示选择Arduino Mega 2560并把波特率设为115200 。
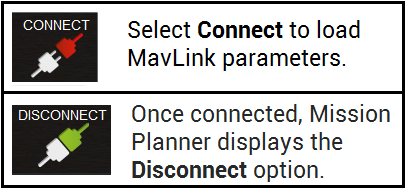
选择Connect (屏幕右上角)来给APM加载MavLink参数。 Mission Planner会显示一个窗口显示MavLink的下载进度。
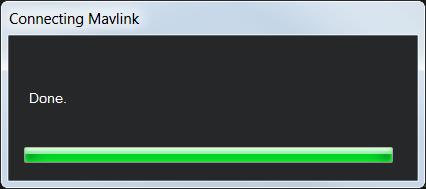
当窗口显示Done并且Mission Planner在Connect位置显示为Disconnect选项时,说明你的APM固件已下载成功。
打开发射机。检查发射机是不是在飞机模式(APM不管驾驶什么种类的平台都需要使用飞机模式)并且所有微调都在中点。
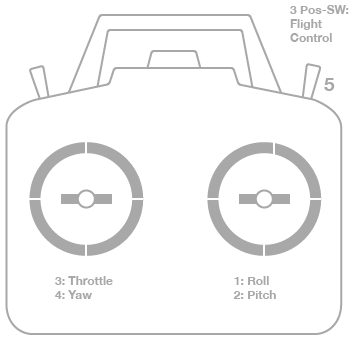
左边摇杆控制油门和yaw;右边摇杆用来控制roll和pitch。三段开关用来控制飞行模式。
在Mission Planner中,选择Mandatory Hardware和Radio Calibration。点击窗口右下方绿色的Calibrate Radio按钮。Mission Planner会弹出一个对话框来确定遥控设备已开启,电池没有连接,以及螺旋桨没有安装。
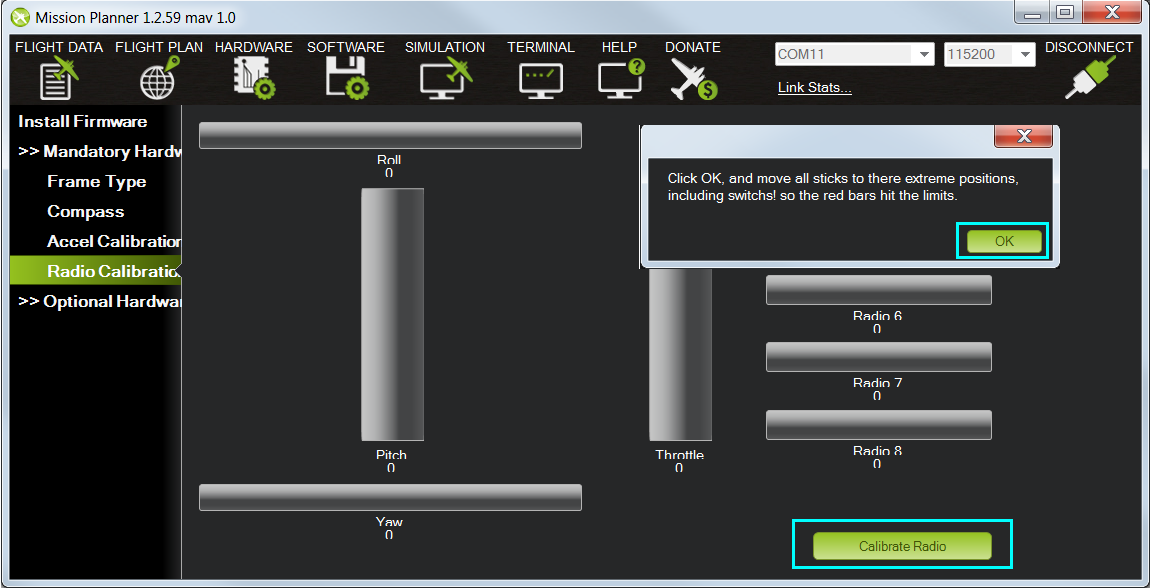
点击OK;你的发射机上移动控制摇杆以及拨动开关到它们的行程极限,观察无线校准条上的结果。红线会显示在校准条上标明最大最小值。拨动通道5与通道6的扭子开关通过它们的位置范围(通道7与通道8在基本操作中不需要使用)。
你的发射机应能引起下列控制变化:
通道1: 低 = roll 向左,高 = roll 向右。
通道2: 低 =pitch向前,高=pitch向后。
通道3: 低 =油门减(关),高=油门加。
通道4: 低 = yaw向左,高 = yaw向右。
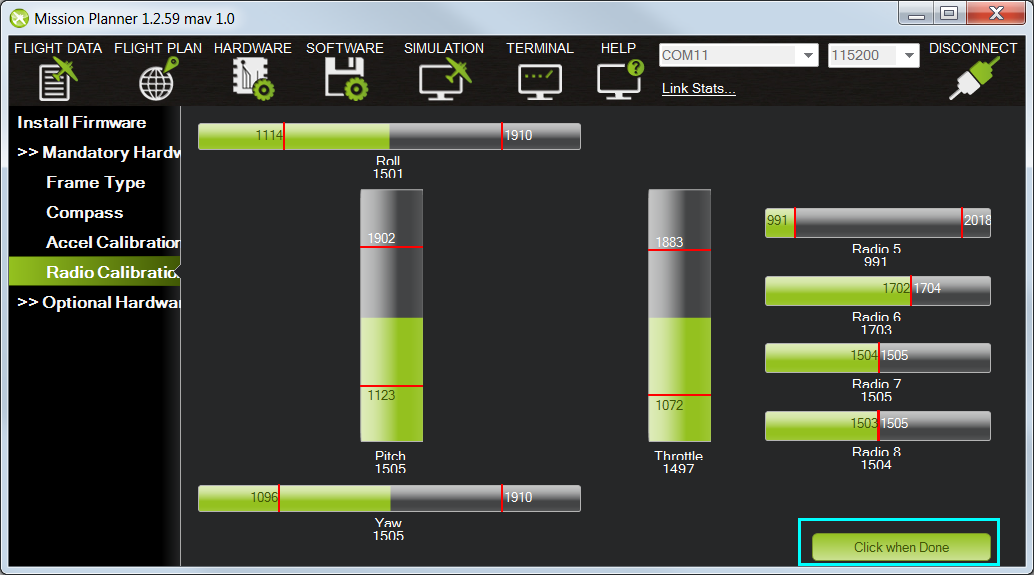
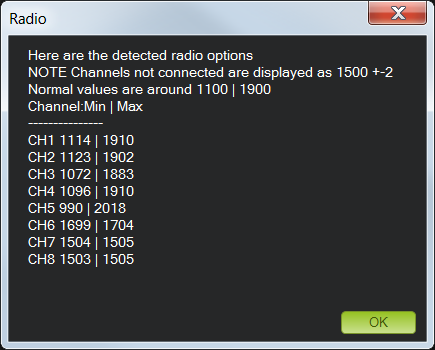
当roll,pitch,油门,yaw,还有通道5 (与可选的通道6)上的红条设定到了最大和最小的位置上,选择Click when Done。Mission Planner会显示校准数据的摘要信息。一般数值在最小1100,最大1900左右。
3. 安装螺旋桨
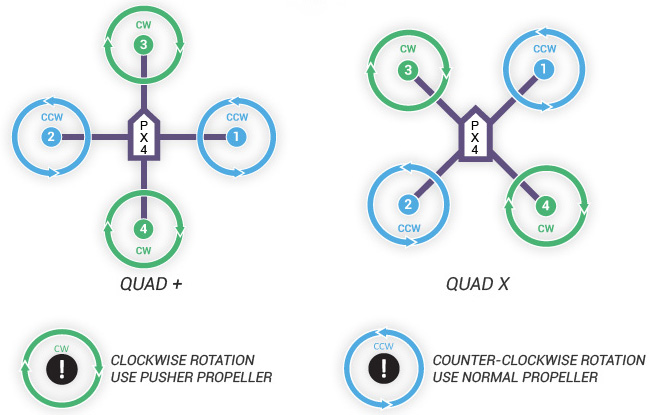
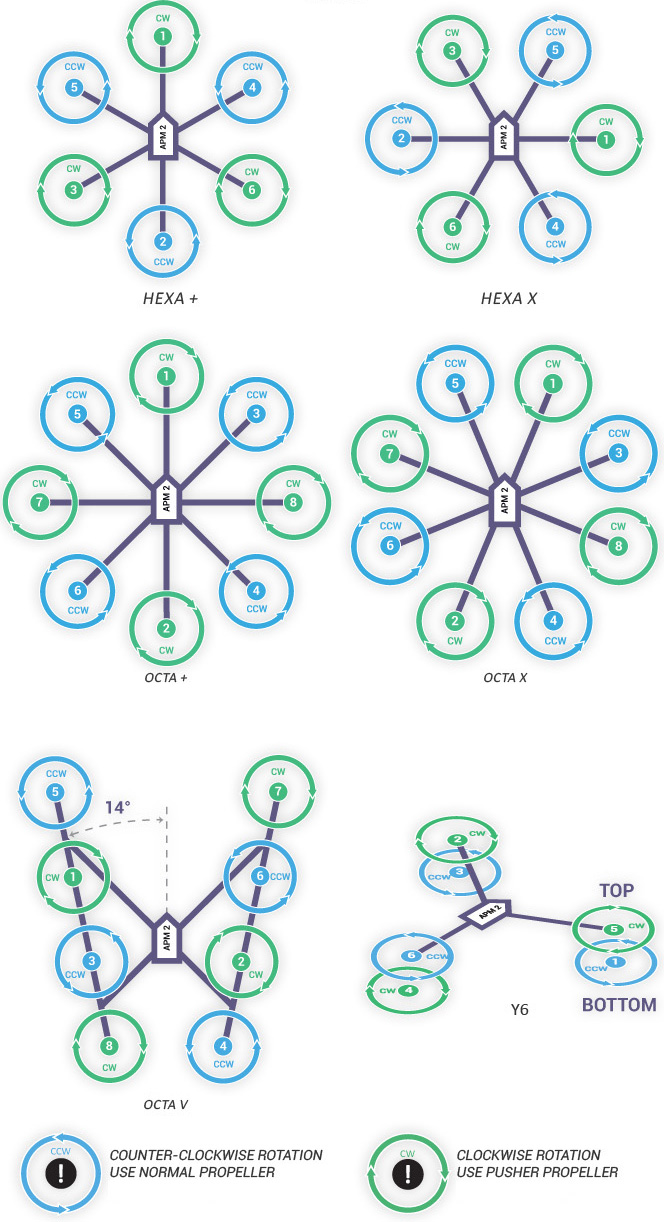
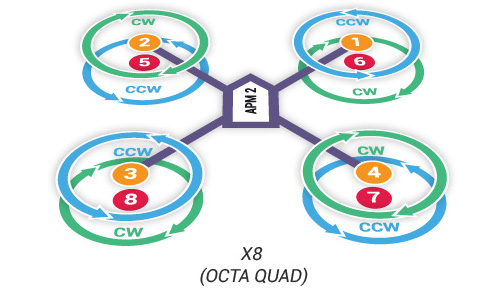
拧松桨夹螺母,然后把螺旋桨有字的那面朝上对着天放到电机夹头上 。如果你的配置使用同轴电机,即使电机是朝下的,确保桨上有字的那面也是朝上的。如果桨中心高度低于5mm,需要在桨夹上方添加金属垫片。拧紧桨夹确保螺旋桨不会动。尝试把2mm (5/64)六角扳手插入桨夹上的洞里,让你拧紧桨夹的时候更好用力。基于电机方向选择螺旋桨。在下面的图片中找到你的机架,标记为顺时针的电机使用反桨,正浆标记为逆时针。反桨上通常在螺旋桨上标着“P”或“SFP”。
4. Pre-flight 信息
安全是成功飞行的关键。请在飞行之前阅读安全信息页面。选择一个无人居住的区域飞行你的飞行器,远离人群和发达地区,并且在连接电池之前始终执行the pre-flight checklist。确保阅读了有关解锁、上锁还有飞行时如何控制你的飞行器的信息的Flying页面。
你准备要飞的时候,让飞行器背对着你放在地上。当你准备给你的飞行器通电时,连接充满电的LiPo电池到电源分线器上。接着执行在Flying页面上描述的安全解锁与上锁步骤。

5. 接下来
尝试学习有关各种自动飞行模式,发挥你的APM:Copter最大潜力,包括悬停和执行任务。
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号