



















Turbot4-ARM仿真入门教程-gazebo仿真
说明
- 介绍如何利用turbot4-arm进行gazebo仿真
步骤
- 加载gazebo环境
. /usr/share/gazebo/setup.bash
- 启动仿真并指定模型
ros2 launch interbotix_xslocobot_sim xslocobot_gz_classic.launch.py robot_model:=locobot_wx200 verbose:=true
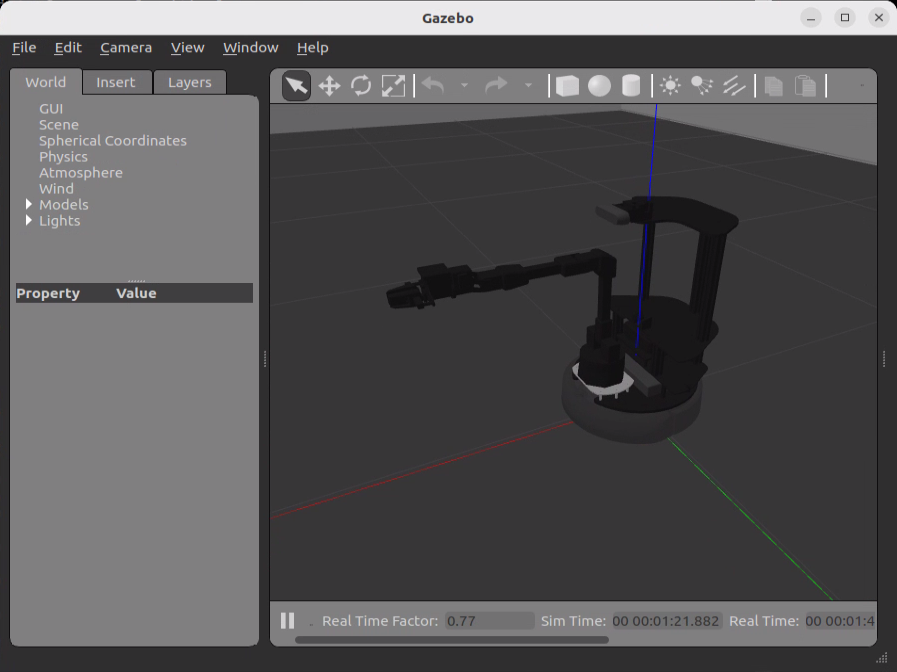
- gazebo效果图
- rviz效果图

- 启动键盘控制
ros2 run teleop_twist_keyboard teleop_twist_keyboard --ros-args --remap cmd_vel:=/locobot/diffdrive_controller/cmd_vel_unstamped
- 使用命令控制小车
#控制绕一个圆
ros2 topic pub --rate 10 --times 50 /locobot/diffdrive_controller/cmd_vel_unstamped geometry_msgs/Twist '{linear: {x: 0.5, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 0.5}}'
- 查看速度
ros2 topic echo /locobot/diffdrive_controller/cmd_vel_unstamped
- 查看TF
ros2 run rqt_tf_tree rqt_tf_tree
查看摄像头内容
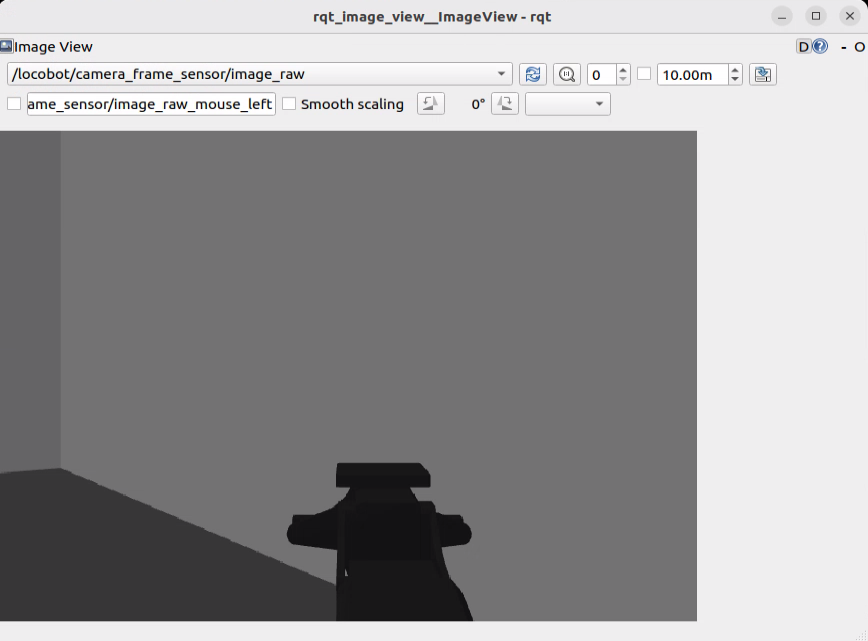
- 方法1,通过rqt_image_view
ros2 run rqt_image_view rqt_image_view
- 订阅如下话题
/locobot/camera_frame_sensor/depth/image_raw
/locobot/camera_frame_sensor/image_raw
/locobot/camera_frame_sensor/image_raw/compressed
- 效果图:
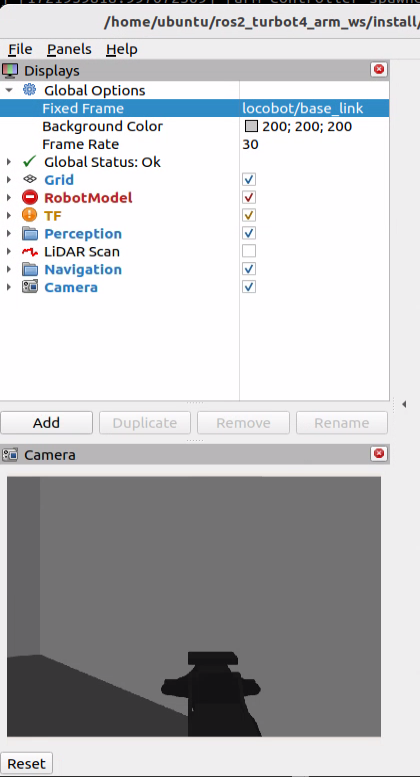
方法2,通过rviz话题订阅
效果图:
错误说明
- gazebo启动会出现提示与drop_wheel相关插件不能正常加载的错误
目前还没解决方法,不过没有影响使用。这个只要影响到rviz上的TF和模型显示红色
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号