编写新的 Costmap2D 插件

概述
本教程将介绍如何为 Costmap2D 创建自己的简单 插件。
在开始本教程之前,请先查看此 video,其中包含有关 Costmap2D 图层设计和插件基本操作原理的信息。
要求
假设 ROS 2、Gazebo 和 TurtleBot3 软件包已在本地安装或构建。请确保 Nav2 项目也在本地构建,因为它是在 构建与安装 中创建的。
教程步骤
1-编写一个新的 Costmap2D 插件
为了演示,此示例将创建一个成本地图插件,将重复的成本梯度放在成本地图中。
本教程的注释代码可以在 navigation2_tutorials 存储库中找到,作为 nav2_gradient_costmap_plugin ROS 2 包。
在为 Costmap2D 制作自己的图层插件时,请参考它。
插件类“nav2_gradient_costmap_plugin::GradientLayer”继承自基类“nav2_costmap_2d::Layer”:
namespace nav2_gradient_costmap_plugin
{
class GradientLayer : public nav2_costmap_2d::Layer
基础类提供了一组虚拟方法 API,用于在插件中使用 costmap 图层。这些方法在运行时由“LayeredCostmap”调用。下表列出了方法列表、方法说明以及在插件代码中使用这些方法的必要性:
Virtual method |
Method description |
Requires override? |
onInitialize() |
Method is called at the end of plugin initialization. There is usually declarations of ROS parameters. This is where any required initialization should occur. |
No |
updateBounds() |
Method is called to ask the plugin: which area of costmap layer it needs to update. The method has 3 input parameters: robot position and orientation, and 4 output parameters: pointers to window bounds. These bounds are used for performance reasons: to update the area inside the window where new info is available, avoiding updates of the whole costmap on every iteration. |
Yes |
updateCosts() |
Method is called each time when costmap re-calculation is required. It
updates the costmap layer only within its bounds window. The method has 4
input parameters: calculation window bounds, and 1 output parameter:
reference to a resulting costmap |
Yes |
matchSize() |
Method is called each time when map size was changed. |
No |
onFootprintChanged() |
Method is called each time when footprint was changed. |
No |
reset() |
It may have any code to be executed during costmap reset. |
Yes |
在我们的示例中,这些方法具有以下功能:
GradientLayer::onInitialize()包含 ROS 参数及其默认值的声明:
declareParameter("enabled", rclcpp::ParameterValue(true));
node_->get_parameter(name_ + "." + "enabled", enabled_);
并设置“need_recalculation_”边界重新计算指标:
need_recalculation_ = false;
GradientLayer::updateBounds()如果“need_recalculation_”为“true”,则重新计算窗口边界,并且不管“need_recalculation_”值如何都更新它们。GradientLayer::updateCosts()- 在此方法中,梯度直接写入生成的 costmap“master_grid”,而不与之前的层合并。这相当于使用内部“costmap_”,然后调用“updateWithTrueOverwrite()”方法。以下是 master costmap 的梯度生成算法:
int gradient_index;
for (int j = min_j; j < max_j; j++) {
// Reset gradient_index each time when reaching the end of re-calculated window
// by OY axis.
gradient_index = 0;
for (int i = min_i; i < max_i; i++) {
int index = master_grid.getIndex(i, j);
// setting the gradient cost
unsigned char cost = (LETHAL_OBSTACLE - gradient_index*GRADIENT_FACTOR)%255;
if (gradient_index <= GRADIENT_SIZE) {
gradient_index++;
} else {
gradient_index = 0;
}
master_array[index] = cost;
}
}
其中,“梯度大小”是地图单元中每个梯度周期的大小,“梯度因子”是每一步代价地图值的减少量:
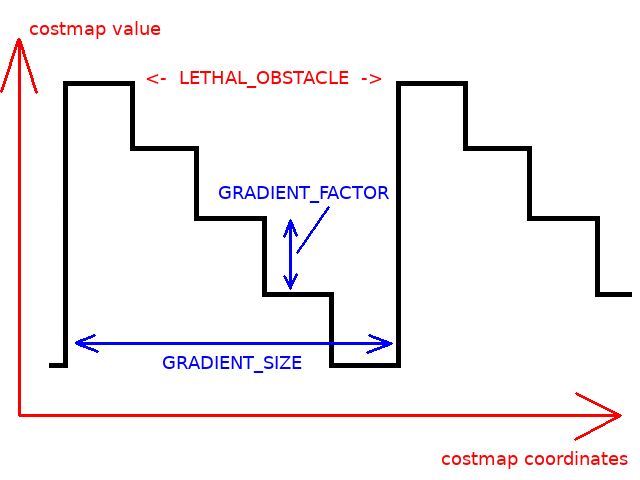
这些参数在插件的头文件中定义。
GradientLayer::onFootprintChanged()just resetsneed_recalculation_value.GradientLayer::reset()方法是虚拟的:它未在本示例插件中使用。它保留在那里,因为父类“Layer”中的纯虚拟函数“reset()”需要被覆盖。
2- 导出并制作 GradientLayer 插件
编写的插件将在运行时作为其基本父类加载,然后由插件处理模块调用(对于 costmap2d,由“LayeredCostmap”调用)。Pluginlib 在运行时打开给定的插件,并提供可调用的导出类的方法。类导出机制告诉 pluginlib 在这些调用期间应使用哪个基本类。这允许通过插件扩展应用程序,而无需了解应用程序源代码或重新编译它。
在我们的示例中,“nav2_gradient_costmap_plugin::GradientLayer”插件的类应动态加载为“nav2_costmap_2d::Layer”基本类。为此,插件应按如下方式注册:
插件的类应该用加载类的基本类型注册。为此,应该将一个特殊的宏“PLUGINLIB_EXPORT_CLASS”添加到组成插件库的任何源文件中:
#include "pluginlib/class_list_macros.hpp"
PLUGINLIB_EXPORT_CLASS(nav2_gradient_costmap_plugin::GradientLayer, nav2_costmap_2d::Layer)
This part is usually placed at the end of cpp-file where the plugin class was written (in our example gradient_layer.cpp). It is good practice to place these lines at the end of the file, but technically, you can also place at the top.
插件的信息应存储到插件的描述文件中。这是通过在插件包中使用单独的 XML(在我们的示例中为“gradient_plugins.xml”)来完成的。此文件包含以下信息:
path: Path and name of library where plugin is placed.
name: Plugin type referenced inplugin_typesparameter (see next section for more details). It could be whatever you want.
type: Plugin class with namespace taken from the source code.
basic_class_type: Basic parent class from which plugin class was derived.
description: Plugin description in a text form.
<library path="nav2_gradient_costmap_plugin_core">
<class type="nav2_gradient_costmap_plugin::GradientLayer" base_class_type="nav2_costmap_2d::Layer">
<description>This is an example plugin which puts repeating costs gradients to costmap</description>
</class>
</library>
插件的导出是通过将“pluginlib_export_plugin_description_file()”cmake 函数包含到“CMakeLists.txt”中来执行的。此函数将插件描述文件安装到“share”目录中,并为插件描述 XML 设置索引,以便可以作为所选类型的插件被发现:
pluginlib_export_plugin_description_file(nav2_costmap_2d gradient_layer.xml)
插件描述文件也应该添加到``package.xml``中。costmap_2d``是接口定义的包,对于我们的例子``Layer,需要xml文件的路径:
<export>
<costmap_2d plugin="${prefix}/gradient_layer.xml" />
...
</export>
一切完成后,将插件包放入某个 ROS 2 工作区的 src 目录中,构建插件包(“colcon build –packages-select nav2_gradient_costmap_plugin –symlink-install”)并在必要时获取 setup.bash 文件。
现在该插件已可供使用。
3- 在 Costmap2D 中启用插件
下一步需要告诉 Costmap2D 有关新插件的信息。为此,应该将插件添加到“nav2_params.yaml”中的“plugin_names”和“plugin_types”列表中,或者为“local_costmap”/“global_costmap”添加,以便在运行时为 Controller/Planner Server 启用。“plugin_names”列表包含插件对象的名称。这些名称可以是任何你想要的名字。“plugin_types”包含“plugin_names”对象中列出的类型。这些类型应该对应于插件描述 XML 文件中指定的插件类的“name”字段。
Note
对于 Galactic 或更高版本,“plugin_names”和“plugin_types”已被替换为插件名称的单个“plugins”字符串向量。类型现在在“plugin:”字段中的“plugin_name”命名空间中定义(例如“plugin: MyPlugin::Plugin”)。代码块中的内联注释将帮助您完成此操作。
For example:
--- a/nav2_bringup/bringup/params/nav2_params.yaml
+++ b/nav2_bringup/bringup/params/nav2_params.yaml
@@ -124,8 +124,8 @@ local_costmap:
width: 3
height: 3
resolution: 0.05
- plugins: ["obstacle_layer", "voxel_layer", "inflation_layer"]
+ plugins: ["obstacle_layer", "voxel_layer", "gradient_layer"]
robot_radius: 0.22
inflation_layer:
cost_scaling_factor: 3.0
@@ -171,8 +171,8 @@ global_costmap:
robot_base_frame: base_link
global_frame: map
use_sim_time: True
- plugins: ["static_layer", "obstacle_layer", "voxel_layer", "inflation_layer"]
+ plugins: ["static_layer", "obstacle_layer", "voxel_layer", "gradient_layer"]
robot_radius: 0.22
resolution: 0.05
obstacle_layer:
YAML 文件还可能包含每个插件的参数列表(如果有),由插件对象名称标识。
NOTE: 同一类型的插件对象可能会同时加载多个。为此,“plugin_names”列表应包含不同的插件名称,无论“plugin_types”是否保持相同的类型。例如:
plugins: ["obstacle_layer", "gradient_layer_1", "gradient_layer_2"]
在这种情况下,每个插件对象将由 YAML 文件中其自己的参数树处理,例如:
gradient_layer_1:
plugin: nav2_gradient_costmap_plugin::GradientLayer # In Iron and older versions, "/" was used instead of "::"
enabled: True
...
gradient_layer_2:
plugin: nav2_gradient_costmap_plugin::GradientLayer # In Iron and older versions, "/" was used instead of "::"
enabled: False
...
4- 运行 GradientLayer 插件
运行启用 Nav2 的 Turtlebot3 模拟。详细的操作说明写在 入门指南。下面是快捷命令:
$ ros2 launch nav2_bringup tb3_simulation_launch.py
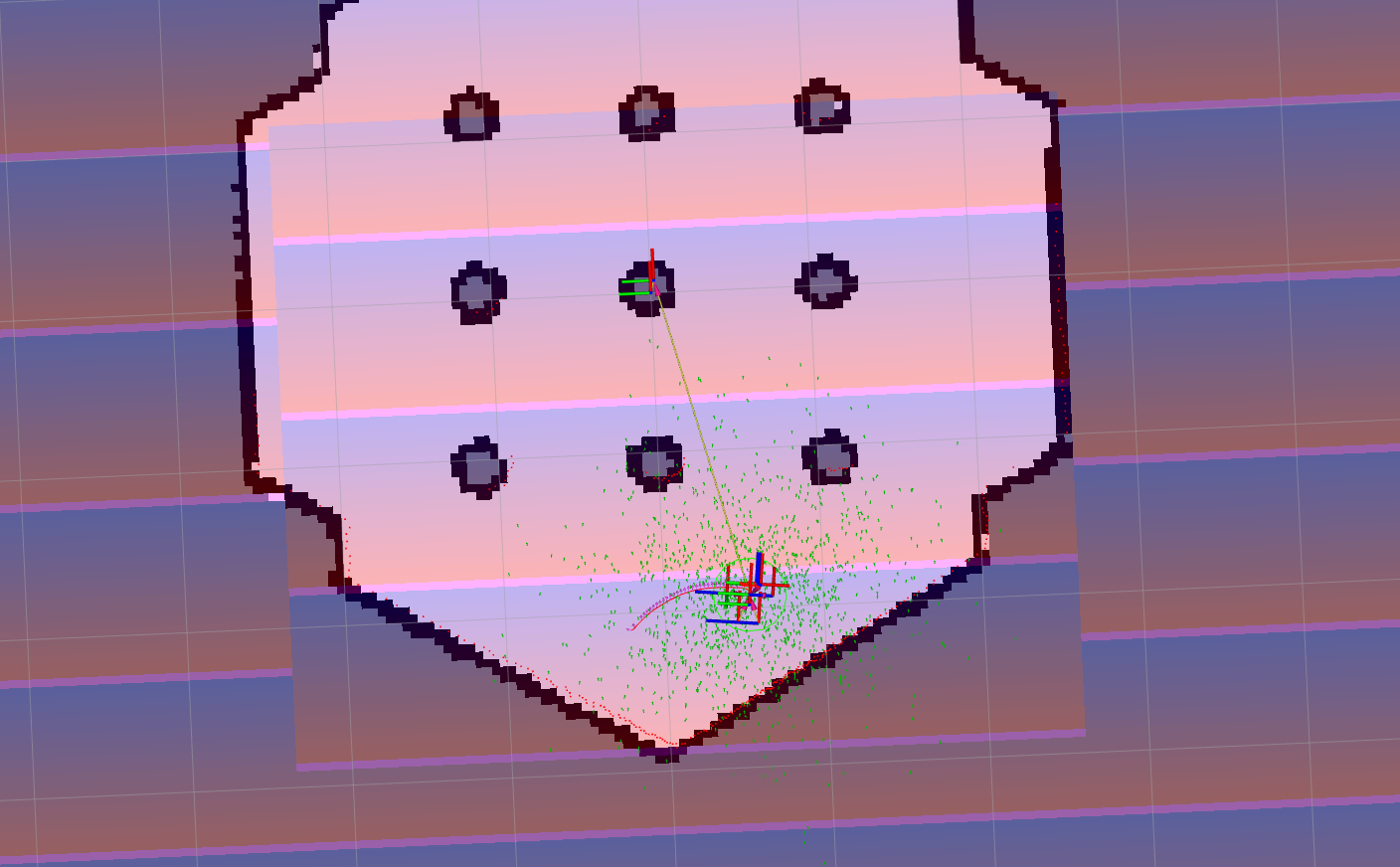
然后转到 RViz 并单击顶部的“2D Pose Estimate”按钮,并按照 入门指南 中所述指向地图上的位置。机器人将在地图上定位,结果应如下图所示。在那里,可以看到梯度代价地图。还有 2 件值得注意的事情:通过 GradientLayer::updateCosts() 动态更新其范围内的代价地图和通过梯度弯曲的全局路径: