Constrained smoother
源代码在 Github.
nav2_smoother 的平滑器插件基于 nav2_smac_planner 中原有的已弃用的平滑器,由“RoboTech Vision”投入运行。 适用于需要将规划的全局路径推离障碍物和/或 Reeds-Shepp 运动模型的应用程序。它针对大型 Ceres 优化程序中的路径长度、平滑度、与障碍物的距离和曲率进行优化。 .. TruncatePathLocal BT Node: bt-plugins/actions/TruncatePathLocal.html
重要提示:约束平滑器使用相当繁重的优化算法,因此建议在周期性截断的路径上使用。 TruncatePathLocal BT Node 可用于实现适当的路径长度,DistanceController BT Node 可用于实现周期性。
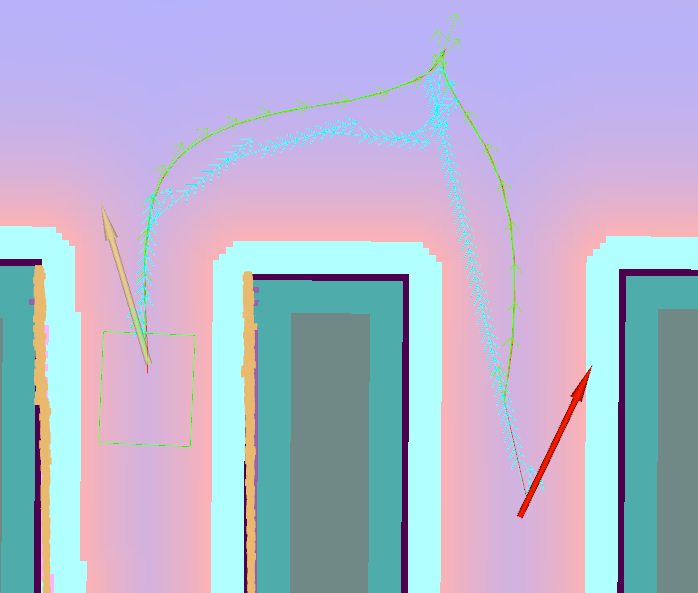
下图描述了约束平滑器如何改善输入路径的质量(青色,由过时的 Smac Planner 版本生成,故意未进行最佳配置以突出平滑器的强大功能), 增加其平滑度和与障碍物的距离。结果路径以绿色标记。注意:由于此路径上使用 TruncatePathLocal,因此最后几个路径姿势未平滑。
更平滑的服务器参数
- reversing_enabled:
Type
Default
bool
true
- Description
是否检测正向/反向方向和尖点。对于未指定方向的路径,应设置为 false
- path_downsampling_factor:
Type
Default
int
1
- Description
路径上的每 n 个节点都会被优化。有助于提高速度
- path_upsampling_factor:
Type
Default
int
1
- Description
用于细化的上采样因子。0 - 路径保持下采样(参见``path_downsampling_factor``),1 - 使用三次贝塞尔将路径上采样回原始粒度,2… - 更多上采样
- keep_start_orientation:
Type
Default
bool
true
- Description
是否防止起始方向被平滑
- keep_goal_orientation:
Type
Default
bool
true
- Description
是否防止目标定位被平滑
- minimum_turning_radius:
Type
Default
double
0.4
- Description
机器人可以执行的最小转弯半径。对于 diff-drive/holonomic 机器人,可以设置为 0.0(或将 w_curve 设置为 0.0 以获得相同效果)
- w_curve:
Type
Default
double
30.0
- Description
强制最小转弯半径的重量
- w_dist:
Type
Default
double
0.0
- Description
将路径与原件绑定的权重作为成本权重的可选替代方案
- w_smooth:
Type
Default
double
2000000.0
- Description
权重最大化路径平滑度
- w_cost:
Type
Default
double
0.015
- Description
控制机器人避免碰撞的重量和成本
- w_cost_cusp_multiplier:
Type
Default
double
3.0
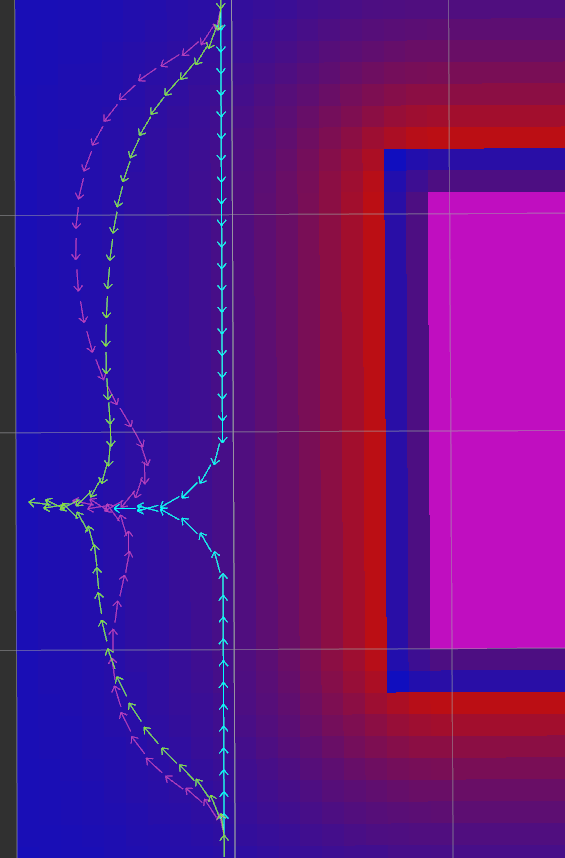
Description 在正向/反向方向改变期间使用更高权重的选项,帮助优化器收敛或在这些问题部分添加额外的避障。 下图显示了使用“w_cost_cusp_multiplier”(绿色)的路径与没有使用“w_cost_cusp_multiplier”(紫色)的路径相比的改进。原始路径为青色。
- cusp_zone_length:
Type
Default
double
2.5
- Description
节点使用“w_cost_cusp_multiplier”的尖点周围部分的长度(w_cost 在区域内向尖点逐渐上升,其成本图权重等于 w_cost*w_cost_cusp_multiplier)
- cost_check_points:
Type
Default
array of double
[]
- Description
机器人框架中用于获取代价地图值的点。格式:[x1, y1, weight1, x2, y2, weight2, …]。
重要提示:需要大量优化器迭代才能真正改善路径。仅在真正需要时使用(高度拉长/不对称的机器人)
下图描述了如何使用两个成本检查点来提高矩形机器人的成本意识。

- optimizer.max_iterations:
Type
Default
int
100
- Description
优化器迭代的最大次数
- optimizer.debug_optimizer:
Type
Default
bool
false
- Description
是否打印优化器调试信息
- optimizer.linear_solver_type:
Type
Default
string
“SPARSE_NORMAL_CHOLESKY”
- Description
优化器使用的线性求解器类型。有效值为“SPARSE_NORMAL_CHOLESKY”和“DENSE_QR”
- optimizer.gradient_tol:
Type
Default
bool
1e-10
- Description
梯度容差优化终止准则
- optimizer.fn_tol:
Type
Default
bool
1e-7
- Description
函数容差优化终止准则
- optimizer.param_tol:
Type
Default
bool
1e-15
- Description
参数容差优化终止准则
Example
smoother_server:
ros__parameters:
use_sim_time: True
smoother_plugins: ["SmoothPath"]
SmoothPath:
plugin: "nav2_constrained_smoother/ConstrainedSmoother"
reversing_enabled: true # whether to detect forward/reverse direction and cusps. Should be set to false for paths without orientations assigned
path_downsampling_factor: 3 # every n-th node of the path is taken. Useful for speed-up
path_upsampling_factor: 1 # 0 - path remains downsampled, 1 - path is upsampled back to original granularity using cubic bezier, 2... - more upsampling
keep_start_orientation: true # whether to prevent the start orientation from being smoothed
keep_goal_orientation: true # whether to prevent the gpal orientation from being smoothed
minimum_turning_radius: 0.40 # minimum turning radius the robot can perform. Can be set to 0.0 (or w_curve can be set to 0.0 with the same effect) for diff-drive/holonomic robots
w_curve: 30.0 # weight to enforce minimum_turning_radius
w_dist: 0.0 # weight to bind path to original as optional replacement for cost weight
w_smooth: 2000000.0 # weight to maximize smoothness of path
w_cost: 0.015 # weight to steer robot away from collision and cost
# Parameters used to improve obstacle avoidance near cusps (forward/reverse movement changes)
w_cost_cusp_multiplier: 3.0 # option to use higher weight during forward/reverse direction change which is often accompanied with dangerous rotations
cusp_zone_length: 2.5 # length of the section around cusp in which nodes use w_cost_cusp_multiplier (w_cost rises gradually inside the zone towards the cusp point, whose costmap weight eqals w_cost*w_cost_cusp_multiplier)
# Points in robot frame to grab costmap values from. Format: [x1, y1, weight1, x2, y2, weight2, ...]
# IMPORTANT: Requires much higher number of iterations to actually improve the path. Uncomment only if you really need it (highly elongated/asymmetric robots)
# cost_check_points: [-0.185, 0.0, 1.0]
optimizer:
max_iterations: 70 # max iterations of smoother
debug_optimizer: false # print debug info
gradient_tol: 5e3
fn_tol: 1.0e-15
param_tol: 1.0e-20