Jazzy 到 K-Turtle
从 ROS 2 Jazzy 迁移到 K-Turtle 时,我们增加了一些稳定性改进,但在此不作具体介绍。
使用静态基础设施或动态对接进行对接
在 PR #4627 中,添加了对接插件类型和逻辑,以支持 nav2 对接服务器中的非充电对接类型。 这允许用户指定静态基础设施(例如传送带)或动态对接位置(例如托盘)的对接位置。 它还包括一个新的对接插件,以演示新的对接服务器功能“simple_non_charging_dock”。
用于对接的新 RViz 面板
在 PR #4458 中,添加了一个新的 RViz 面板以与对接服务器交互。
该面板允许用户:
将机器人停靠在充电器上,选择停靠 ID 或停靠姿势和类型。它还允许用户设置是否导航到准备姿势。
将机器人从充电器上移除。
面板显示“nav2_msgs/DockRobot”和“nav2_msgs/UndockRobot”操作发布的动作目标状态和反馈。用户可以找到诸如已用时间、重试次数和操作的当前状态(准备、控制等)以及操作的错误代码等信息。
在这里我们可以看到插件的工作演示:

Attention
If the docking server is unavailable, then the combo box of the dock type will be empty.
新的 BT 节点
以下是新添加的 BT 节点列表:
GetPoseFromPath:从输入路径获取特定姿势的操作。RemoveInCollisionGoals:删除成本高于阈值的航点的操作。
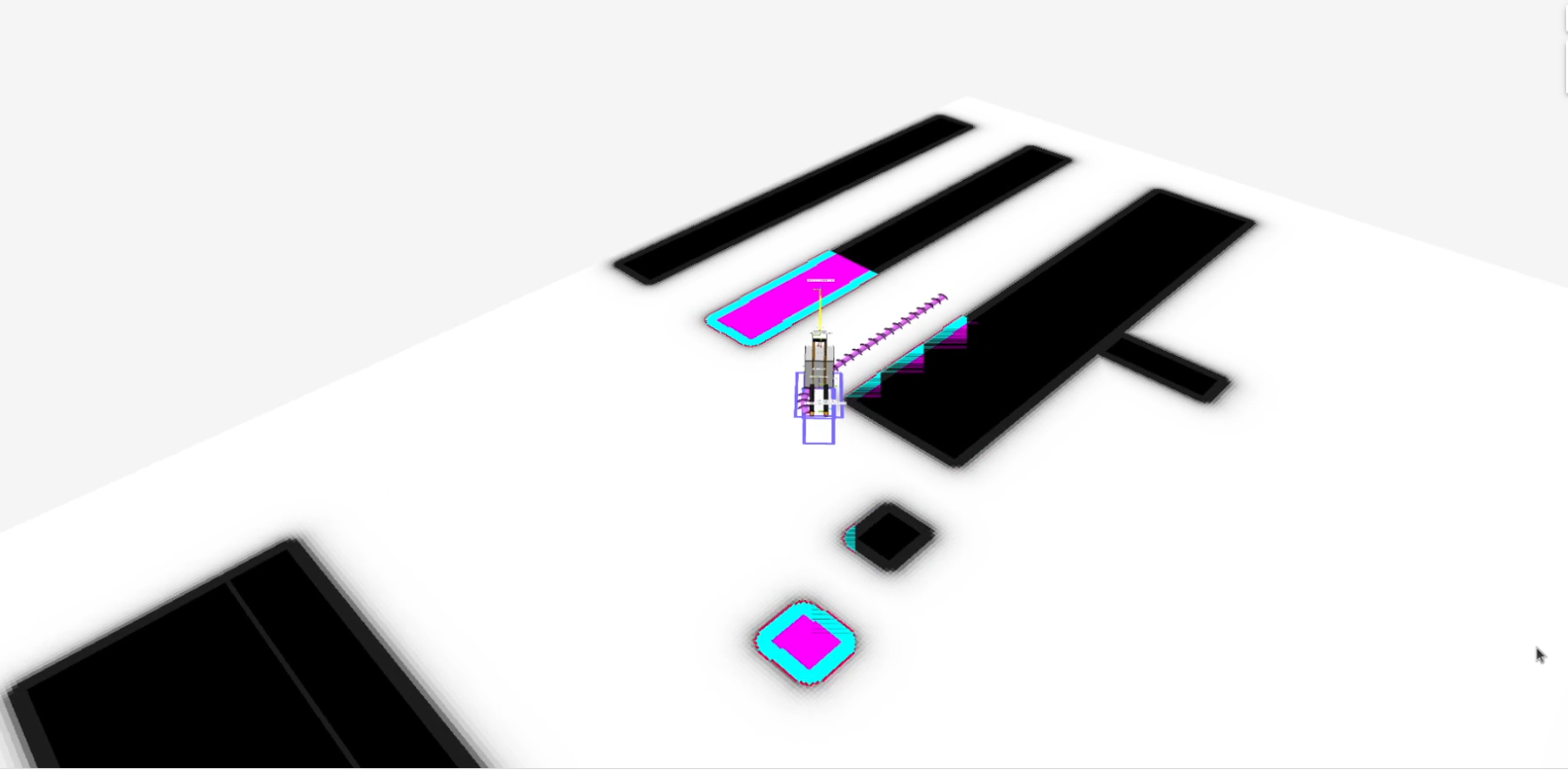
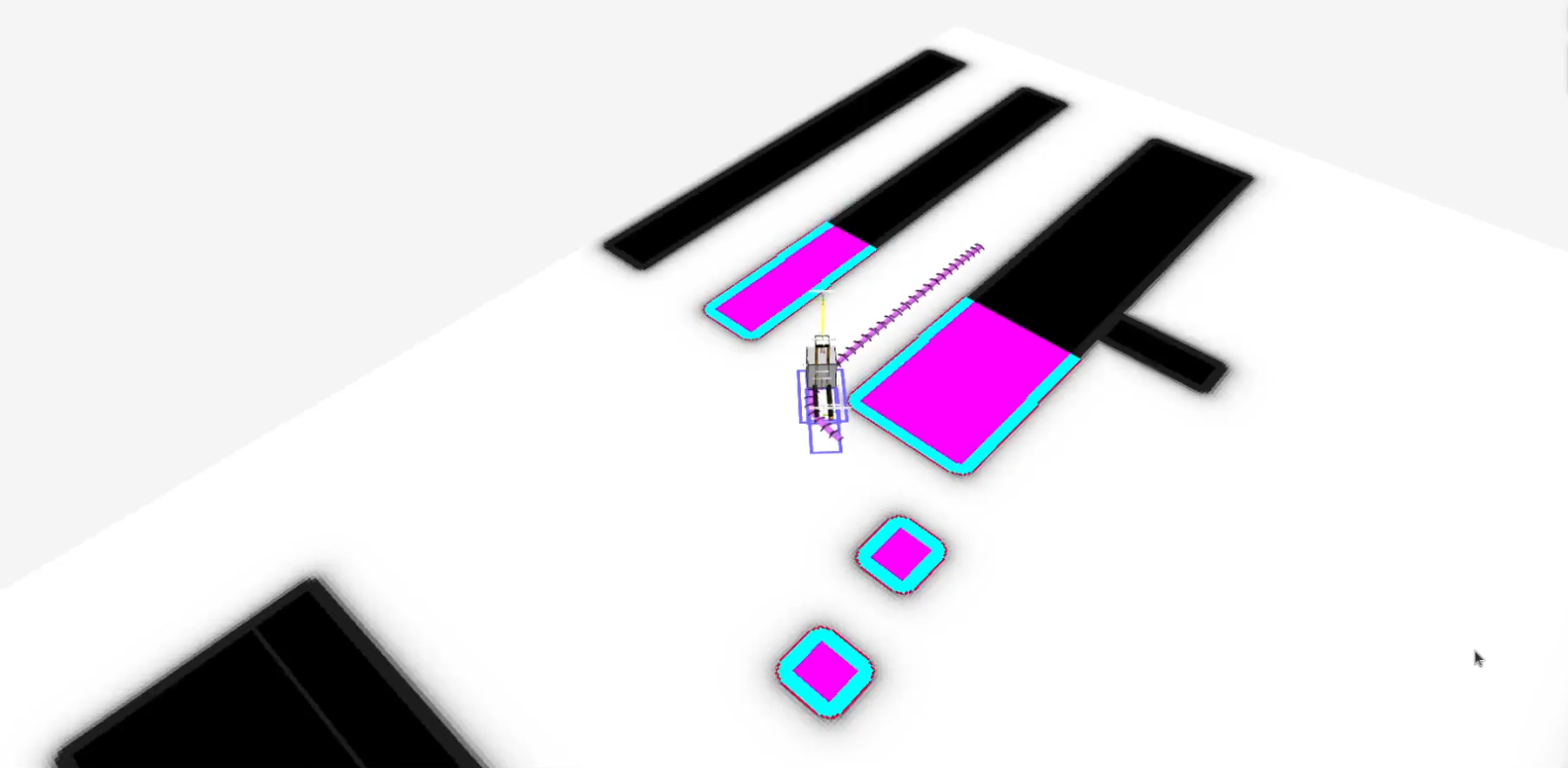
用于成本图成本单元检查的新 RViz 工具
在 PR #4546 中,添加了一个新的 RViz 工具来获取成本图成本单元的成本,并添加了一个服务来获取覆盖位置姿势下的成本单元的成本。
用法:
使用成本图 rviz 工具单击成本图中的任意点,以检索并显示该单元的成本值。
nav2_msgs/GetCosts服务可用于检索足迹姿势的成本
该工具的工作演示:

Attention
If the costmap service is unavailable, then the tool will not be able to fetch and display the cost values.
修复闪烁可视化
在 PR #4561 中,已将 map_vis_z 参数引入 Costmap2DROS,以帮助修改略低于默认平面的地图,旨在消除 rviz 可视化闪烁问题。
默认值:
map_vis_z:0.0
不闪烁的最小值:
map_vis_z:-0.008
之前:
之后:
通过 DWB 轨迹限制速度的选项
在 PR #4663 中,向 DWB 本地规划器引入了一个 limit_vel_cmd_in_traj 参数,以允许用户根据机器人的当前速度限制轨迹生成中使用的速度。
默认值:
false
在目标退出时禁用零速度发布的选项
在 PR #4675 中,为 Controller server 引入了 publish_zero_velocity 参数,以便在目标退出时禁用零速度发布。
默认值:
true