Theta Star Planner
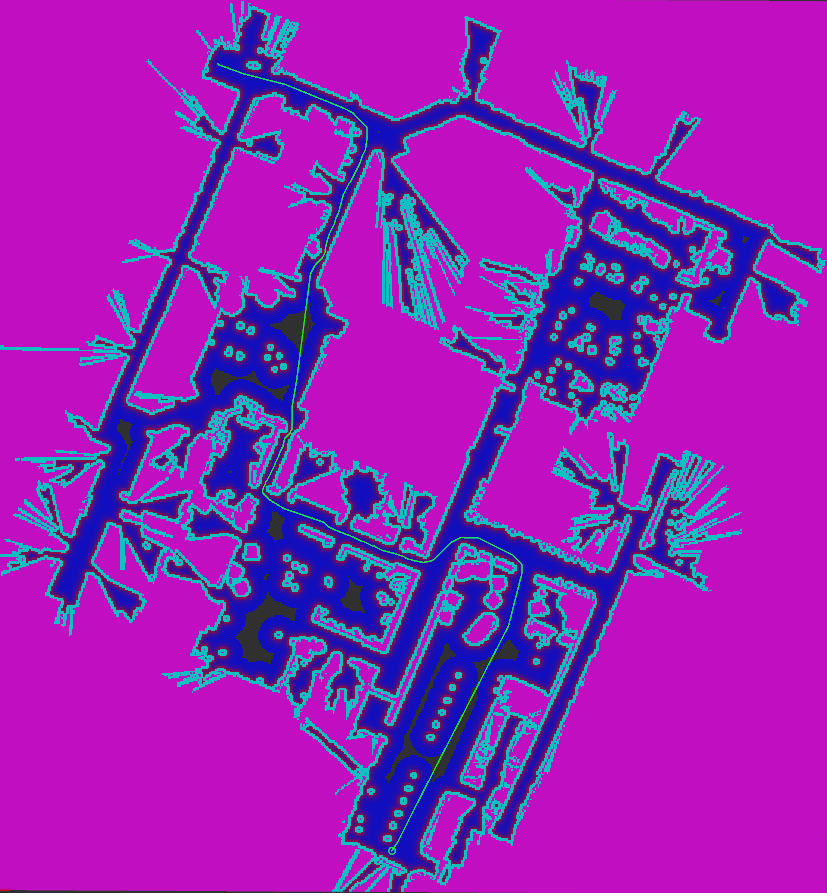
Theta Star Planner implements the Theta* path planner meant to plan any-angled line-segment focused paths using A*.
For the below example the planner took ~46ms (averaged value) to compute the path of 87.5m -
<name> is the corresponding planner plugin ID selected for this type.
Parameters
The parameters of the planner are:
<name>.how_many_corners:Type
Default
int
8
- Description
To choose between 4-connected (up, down, left, right) and 8-connected (all the adjacent cells) graph expansions, the accepted values are 4 and 8
<name>.w_euc_cost:Type
Default
double
1.0
- Description
Weight applied on the length of the path.
<name>.w_traversal_cost:Type
Default
double
2.0
- Description
It tunes how harshly the nodes of high cost are penalised. From the above g(neigh) equation you can see that the cost-aware component of the cost function forms a parabolic curve, thus this parameter would, on increasing its value, make that curve steeper allowing for a greater differentiation (as the delta of costs would increase, when the graph becomes steep) among the nodes of different costs.
<name>.use_final_approach_orientation:Type
Default
bool
false
- Description
If true, the last pose of the path generated by the planner will have its orientation set to the approach orientation, i.e. the orientation of the vector connecting the last two points of the path
<name>.allow_unknown:Type
Default
bool
True
- Description
Whether to allow planning in unknown space.
<name>.terminal_checking_interval:Type
Default
int
5000
- Description
Number of iterations between checking if the goal has been cancelled or planner timed out
Note
Do go through the README file available on this repo’s link to develop a better understanding of how you could tune this planner. This planner requires you to tune the cost_scaling_factor parameter of your costmap too, to get good results.
Example
planner_server:
ros__parameters:
expected_planner_frequency: 20.0
use_sim_time: True
planner_plugins: ["GridBased"]
GridBased:
plugin: "nav2_theta_star_planner::ThetaStarPlanner" # In Iron and older versions, "/" was used instead of "::"
how_many_corners: 8
w_euc_cost: 1.0
w_traversal_cost: 2.0
w_heuristic_cost: 1.0