#include <motion_planning_frame_joints_widget.h>
Public Member Functions | |
| JMGItemModel (const moveit::core::RobotState &robot_state, const std::string &group_name, QObject *parent=nullptr) | |
| int | rowCount (const QModelIndex &parent=QModelIndex()) const override |
| int | columnCount (const QModelIndex &parent=QModelIndex()) const override |
| Qt::ItemFlags | flags (const QModelIndex &index) const override |
| QVariant | data (const QModelIndex &index, int role) const override |
| QVariant | headerData (int section, Qt::Orientation orientation, int role) const override |
| bool | setData (const QModelIndex &index, const QVariant &value, int role) override |
| void | updateRobotState (const moveit::core::RobotState &state) |
| call this on any external change of the RobotState More... | |
| moveit::core::RobotState & | getRobotState () |
| const moveit::core::RobotState & | getRobotState () const |
| const moveit::core::JointModelGroup * | getJointModelGroup () const |
Detailed Description
TableModel to display joint values of a referenced RobotState.
Unfortunately we cannot store the RobotStatePtr (and thus ensure existence of the state during the lifetime of this class instance), because RobotInteraction (which is the initial use case) allocates internally a new RobotState if any other copy is held somewhere else. Hence, we also store an (unsafe) raw pointer. Lifetime of this raw pointer needs to be ensured.
Definition at line 67 of file motion_planning_frame_joints_widget.h.
Constructor & Destructor Documentation
◆ JMGItemModel()
| moveit_rviz_plugin::JMGItemModel::JMGItemModel | ( | const moveit::core::RobotState & | robot_state, |
| const std::string & | group_name, | ||
| QObject * | parent = nullptr |
||
| ) |
Definition at line 49 of file motion_planning_frame_joints_widget.cpp.

Member Function Documentation
◆ columnCount()
|
override |
Definition at line 68 of file motion_planning_frame_joints_widget.cpp.
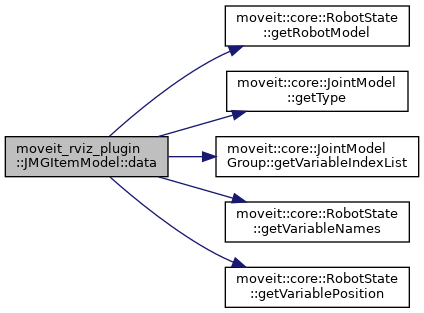
◆ data()
|
override |
Definition at line 88 of file motion_planning_frame_joints_widget.cpp.
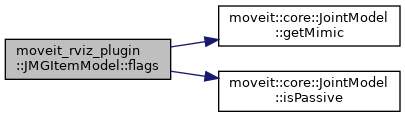
◆ flags()
|
override |
Definition at line 73 of file motion_planning_frame_joints_widget.cpp.
◆ getJointModelGroup()
|
inline |
Definition at line 95 of file motion_planning_frame_joints_widget.h.

◆ getRobotState() [1/2]
|
inline |
Definition at line 87 of file motion_planning_frame_joints_widget.h.

◆ getRobotState() [2/2]
|
inline |
Definition at line 91 of file motion_planning_frame_joints_widget.h.
◆ headerData()
|
override |
Definition at line 133 of file motion_planning_frame_joints_widget.cpp.
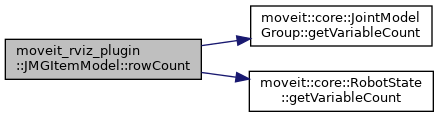
◆ rowCount()
|
override |
Definition at line 56 of file motion_planning_frame_joints_widget.cpp.

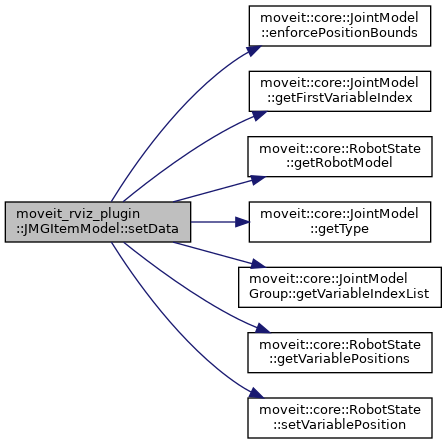
◆ setData()
|
override |
Definition at line 140 of file motion_planning_frame_joints_widget.cpp.
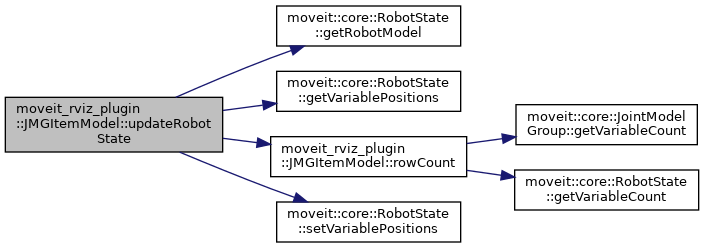
◆ updateRobotState()
| void moveit_rviz_plugin::JMGItemModel::updateRobotState | ( | const moveit::core::RobotState & | state | ) |
call this on any external change of the RobotState
Definition at line 184 of file motion_planning_frame_joints_widget.cpp.
The documentation for this class was generated from the following files:
- moveit_ros/visualization/motion_planning_rviz_plugin/include/moveit/motion_planning_rviz_plugin/motion_planning_frame_joints_widget.h
- moveit_ros/visualization/motion_planning_rviz_plugin/src/motion_planning_frame_joints_widget.cpp