How to use ros2_tracing to trace and analyze an application
This tutorial shows how to use ros2_tracing to trace and analyze a ROS 2 application. For this tutorial, the application will be performance_test.
Overview
This tutorial covers:
installing tracing-related tools and building ROS 2 with the core instrumentation enabled
running and tracing a
performance_testrunanalyzing the trace data using tracetools_analysis to plot the callback durations
Prerequisites
This tutorial is aimed at real-time Linux systems. See the real-time system setup tutorial. However, the tutorial will work if you are using a non-real-time Linux system.
Installing and building
Note
This tutorial should generally work with all supported Linux distributions. However, you might need to adapt some commands.
Install all dependencies for ROS 2 on Linux by following the source installation instructions. Stop before the Build the code in the workspace section.
Install LTTng and babeltrace.
sudo apt-get update
sudo apt-get install -y lttng-tools liblttng-ust-dev python3-lttng python3-babeltrace babeltrace
Then create a workspace, import the ROS 2 Rolling code, and clone performance_test and tracetools_analysis.
cd ~/
mkdir -p tracing_ws/src
cd tracing_ws/src/
vcs import src/ --input https://raw.githubusercontent.com/ros2/ros2/rolling/ros2.repos
cd src/
git clone https://gitlab.com/ApexAI/performance_test.git
git clone https://github.com/ros-tracing/tracetools_analysis.git -b rolling
cd ..
Install dependencies with rosdep.
rosdep update
rosdep install --rosdistro rolling --from-paths src --ignore-src -y --skip-keys "fastcdr rti-connext-dds-6.0.1 urdfdom_headers"
Then build up to performance_test and configure it for ROS 2.
See its documentation.
We also need to build ros2trace to set up tracing using the ros2 trace command and tracetools_analysis to analyze the data.
colcon build --packages-up-to ros2trace ros2run tracetools_analysis performance_test --cmake-args -DPERFORMANCE_TEST_RCLCPP_ENABLED=ON
Source the installation and verify that tracing is enabled:
source install/setup.bash
ros2 run tracetools status
You should see Tracing enabled in the output.
This confirms that LTTng was properly detected and that the instrumentation built into the ROS 2 core is enabled.
Next, we will run a performance_test experiment and trace it.
Tracing
Step 1: Trace
In one terminal, source the workspace and set up tracing.
When running the command, a list of ROS 2 userspace events will be printed.
It will also print the path to the directory that will contain the resulting trace (under ~/.ros/tracing).
# terminal 1
cd ~/tracing_ws
source install/setup.bash
ros2 trace --session-name perf-test --list
Press enter to start tracing.
Step 2: Run Application
In a second terminal, source the workspace.
# terminal 2
cd ~/tracing_ws
source install/setup.bash
Then run the performance_test experiment (or your own application).
We simply create an experiment with a node publishing ~1 MB messages to another node as fast as possible for 60 seconds using the second highest real-time priority so that we don’t interfere with critical kernel threads.
We need to run performance_test as root to be able to use real-time priorities.
# terminal 2
sudo ./install/performance_test/lib/performance_test/perf_test -c rclcpp-single-threaded-executor -p 1 -s 1 -r 0 -m Array1m --reliability RELIABLE --max-runtime 60 --use-rt-prio 98
If that last command doesn’t work for you (with an error like: “error while loading shared libraries”), run the slightly-different command below.
This is because, for security reasons, we need to manually pass *PATH environment variables for some shared libraries to be found (see this explanation).
# terminal 2
sudo env PATH="$PATH" LD_LIBRARY_PATH="$LD_LIBRARY_PATH" ./install/performance_test/lib/performance_test/perf_test -c rclcpp-single-threaded-executor -p 1 -s 1 -r 0 -m Array1m --reliability RELIABLE --max-runtime 60 --use-rt-prio 98
Note
If you’re not using a real-time kernel, simply run:
# terminal 2
./install/performance_test/lib/performance_test/perf_test -c rclcpp-single-threaded-executor -p 1 -s 1 -r 0 -m Array1m --reliability RELIABLE --max-runtime 60
Step 3: Validate Trace
Once the experiment is done, in the first terminal, press enter again to stop tracing.
Use babeltrace to quickly look at the resulting trace.
babeltrace ~/.ros/tracing/perf-test | less
The output of the above command is a human-readable version of the raw Common Trace Format (CTF) data, which is a list of trace events. Each event has a timestamp, an event type, some information on the process that generated the event, and the values of the fields of the given event type.
Use the arrow keys to scroll, or press q to exit.
Next, we will analyze the trace.
Analysis
tracetools_analysis provides a Python API to easily analyze traces.
We can use it in a Jupyter notebook with bokeh to plot the data.
The tracetools_analysis repository contains a few sample notebooks, including one notebook to analyze subscription callback durations.
For this tutorial, we will plot the durations of the subscription callback in the subscriber node.
Install bokeh and then open the sample notebook.
pip3 install bokeh
jupyter notebook ~/tracing_ws/src/tracetools_analysis/tracetools_analysis/analysis/callback_duration.ipynb
This will open the notebook in the browser.
Replace the value for the path variable in the second cell to the path to the trace directory:
path = '~/.ros/tracing/perf-test'
Run the notebook by clicking the Run button for each cell. Running the cell that does the trace processing might take a few minutes on the first run, but subsequent runs will be much quicker.
You should get a plot that looks similar to this:
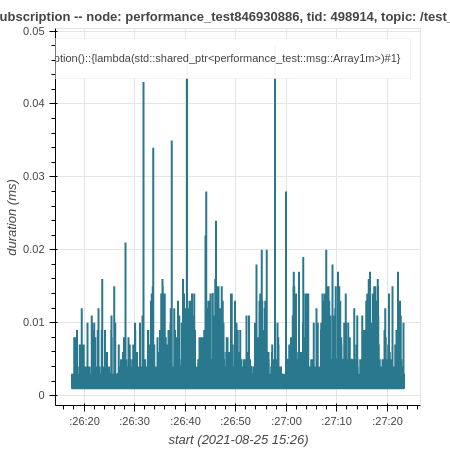
We can see that most of the callbacks take less than 0.01 ms, but there are some outliers taking over 0.02 or 0.03 ms.
Conclusion
This tutorial showed how to install tracing-related tools and build ROS 2 with tracing instrumentation. Then it showed how to trace a performance_test experiment using ros2_tracing and plot the callback durations using tracetools_analysis.
For more trace analyses, take a look at the other sample notebooks and the tracetools_analysis API documentation. The ros2_tracing design document also contains a lot of information.