Classes | |
| struct | ContactTestData |
| Bundles the data for a collision query. More... | |
| class | BulletBVHManager |
| A bounding volume hierarchy (BVH) implementation of a tesseract contact manager. More... | |
| class | BulletCastBVHManager |
| A bounding volume hierarchy (BVH) implementation of a tesseract contact manager. More... | |
| class | BulletDiscreteBVHManager |
| A bounding volume hierarchy (BVH) implementation of a discrete bullet manager. More... | |
| class | CollisionObjectWrapper |
| Tesseract bullet collision object. More... | |
| struct | CastHullShape |
| Casted collision shape used for checking if an object is collision free between two discrete poses. More... | |
| struct | BroadphaseContactResultCallback |
| Callback structure for both discrete and continuous broadphase collision pair. More... | |
| struct | TesseractBroadphaseBridgedManifoldResult |
| class | TesseractCollisionPairCallback |
| A callback function that is called as part of the broadphase collision checking. More... | |
| struct | BroadphaseFilterCallback |
Typedefs | |
| template<typename T > | |
| using | AlignedVector = std::vector< T, Eigen::aligned_allocator< T > > |
| template<typename Key , typename Value > | |
| using | AlignedMap = std::map< Key, Value, std::less< Key >, Eigen::aligned_allocator< std::pair< const Key, Value > >> |
| template<typename Key , typename Value > | |
| using | AlignedUnorderedMap = std::unordered_map< Key, Value, std::hash< Key >, std::equal_to< Key >, Eigen::aligned_allocator< std::pair< const Key, Value > >> |
Enumerations | |
| enum class | CollisionObjectType { USE_SHAPE_TYPE = 0 , CONVEX_HULL = 1 , MULTI_SPHERE = 2 , SDF = 3 } |
Functions | |
| MOVEIT_CLASS_FORWARD (BulletBVHManager) | |
| MOVEIT_CLASS_FORWARD (BulletCastBVHManager) | |
| MOVEIT_CLASS_FORWARD (BulletDiscreteBVHManager) | |
| MOVEIT_CLASS_FORWARD (CollisionObjectWrapper) | |
| bool | acmCheck (const std::string &body_1, const std::string &body_2, const collision_detection::AllowedCollisionMatrix *acm) |
| Allowed = true. More... | |
| btVector3 | convertEigenToBt (const Eigen::Vector3d &v) |
| Converts eigen vector to bullet vector. More... | |
| Eigen::Vector3d | convertBtToEigen (const btVector3 &v) |
| Converts bullet vector to eigen vector. More... | |
| btQuaternion | convertEigenToBt (const Eigen::Quaterniond &q) |
| Converts eigen quaternion to bullet quaternion. More... | |
| btMatrix3x3 | convertEigenToBt (const Eigen::Matrix3d &r) |
| Converts eigen matrix to bullet matrix. More... | |
| btTransform | convertEigenToBt (const Eigen::Isometry3d &t) |
| Converts bullet transform to eigen transform. More... | |
| void | getAverageSupport (const btConvexShape *shape, const btVector3 &localNormal, float &outsupport, btVector3 &outpt) |
| Computes the local supporting vertex of a convex shape. More... | |
| btScalar | addDiscreteSingleResult (btManifoldPoint &cp, const btCollisionObjectWrapper *colObj0Wrap, const btCollisionObjectWrapper *colObj1Wrap, ContactTestData &collisions) |
| Converts a bullet contact result to MoveIt format and adds it to the result data structure. More... | |
| btScalar | addCastSingleResult (btManifoldPoint &cp, const btCollisionObjectWrapper *colObj0Wrap, int, const btCollisionObjectWrapper *colObj1Wrap, int, ContactTestData &collisions) |
| bool | isOnlyKinematic (const CollisionObjectWrapper *cow0, const CollisionObjectWrapper *cow1) |
| Checks if the collision pair is kinematic vs kinematic objects. More... | |
| btCollisionShape * | createShapePrimitive (const shapes::ShapeConstPtr &geom, const CollisionObjectType &collision_object_type, CollisionObjectWrapper *cow) |
| Casts a geometric shape into a btCollisionShape. More... | |
| void | updateCollisionObjectFilters (const std::vector< std::string > &active, CollisionObjectWrapper &cow) |
| Update a collision objects filters. More... | |
| CollisionObjectWrapperPtr | makeCastCollisionObject (const CollisionObjectWrapperPtr &cow) |
| void | updateBroadphaseAABB (const CollisionObjectWrapperPtr &cow, const std::unique_ptr< btBroadphaseInterface > &broadphase, const std::unique_ptr< btCollisionDispatcher > &dispatcher) |
| Update the Broadphase AABB for the input collision object. More... | |
| void | removeCollisionObjectFromBroadphase (const CollisionObjectWrapperPtr &cow, const std::unique_ptr< btBroadphaseInterface > &broadphase, const std::unique_ptr< btCollisionDispatcher > &dispatcher) |
| Remove the collision object from broadphase. More... | |
| void | addCollisionObjectToBroadphase (const CollisionObjectWrapperPtr &cow, const std::unique_ptr< btBroadphaseInterface > &broadphase, const std::unique_ptr< btCollisionDispatcher > &dispatcher) |
| Add the collision object to broadphase. More... | |
| std::pair< std::string, std::string > | getObjectPairKey (const std::string &obj1, const std::string &obj2) |
| Get a key for two object to search the collision matrix. More... | |
| bool | isLinkActive (const std::vector< std::string > &active, const std::string &name) |
| This will check if a link is active provided a list. If the list is empty the link is considered active. More... | |
| collision_detection::Contact * | processResult (ContactTestData &cdata, collision_detection::Contact &contact, const std::pair< std::string, std::string > &key, bool found) |
| Stores a single contact result in the requested way. More... | |
| int | createConvexHull (AlignedVector< Eigen::Vector3d > &vertices, std::vector< int > &faces, const AlignedVector< Eigen::Vector3d > &input, double shrink=-1, double shrinkClamp=-1) |
| Create a convex hull from vertices using Bullet Convex Hull Computer. More... | |
| void | getActiveLinkNamesRecursive (std::vector< std::string > &active_links, const urdf::LinkConstSharedPtr &urdf_link, bool active) |
| Recursively traverses robot from root to get all active links. More... | |
| shapes::ShapePtr | constructShape (const urdf::Geometry *geom) |
| Eigen::Isometry3d | urdfPose2Eigen (const urdf::Pose &pose) |
| rclcpp::Logger | getLogger () |
| btCollisionShape * | createShapePrimitive (const shapes::Box *geom, const CollisionObjectType &collision_object_type) |
| btCollisionShape * | createShapePrimitive (const shapes::Sphere *geom, const CollisionObjectType &collision_object_type) |
| btCollisionShape * | createShapePrimitive (const shapes::Cylinder *geom, const CollisionObjectType &collision_object_type) |
| btCollisionShape * | createShapePrimitive (const shapes::Cone *geom, const CollisionObjectType &collision_object_type) |
| btCollisionShape * | createShapePrimitive (const shapes::Mesh *geom, const CollisionObjectType &collision_object_type, CollisionObjectWrapper *cow) |
| btCollisionShape * | createShapePrimitive (const shapes::OcTree *geom, const CollisionObjectType &collision_object_type, CollisionObjectWrapper *cow) |
Variables | |
| const btScalar | BULLET_MARGIN = 0.0f |
| const btScalar | BULLET_SUPPORT_FUNC_TOLERANCE = 0.01f METERS |
| const btScalar | BULLET_LENGTH_TOLERANCE = 0.001f METERS |
| const btScalar | BULLET_EPSILON = 1e-3f |
| const btScalar | BULLET_DEFAULT_CONTACT_DISTANCE = 0.00f |
| const bool | BULLET_COMPOUND_USE_DYNAMIC_AABB = true |
Typedef Documentation
◆ AlignedMap
| using collision_detection_bullet::AlignedMap = typedef std::map<Key, Value, std::less<Key>, Eigen::aligned_allocator<std::pair<const Key, Value> >> |
Definition at line 40 of file basic_types.h.
◆ AlignedUnorderedMap
| using collision_detection_bullet::AlignedUnorderedMap = typedef std::unordered_map<Key, Value, std::hash<Key>, std::equal_to<Key>, Eigen::aligned_allocator<std::pair<const Key, Value> >> |
Definition at line 43 of file basic_types.h.
◆ AlignedVector
| using collision_detection_bullet::AlignedVector = typedef std::vector<T, Eigen::aligned_allocator<T> > |
Definition at line 37 of file basic_types.h.
Enumeration Type Documentation
◆ CollisionObjectType
|
strong |
Definition at line 46 of file basic_types.h.
Function Documentation
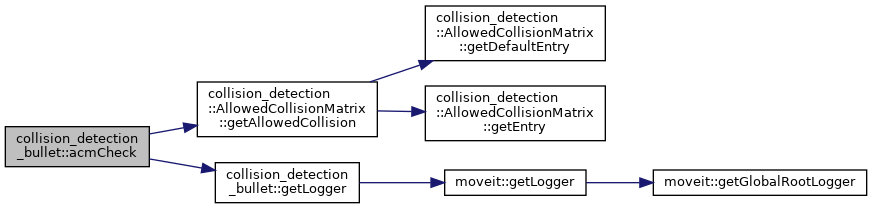
◆ acmCheck()
| bool collision_detection_bullet::acmCheck | ( | const std::string & | body_1, |
| const std::string & | body_2, | ||
| const collision_detection::AllowedCollisionMatrix * | acm | ||
| ) |
Allowed = true.
Definition at line 49 of file bullet_utils.cpp.

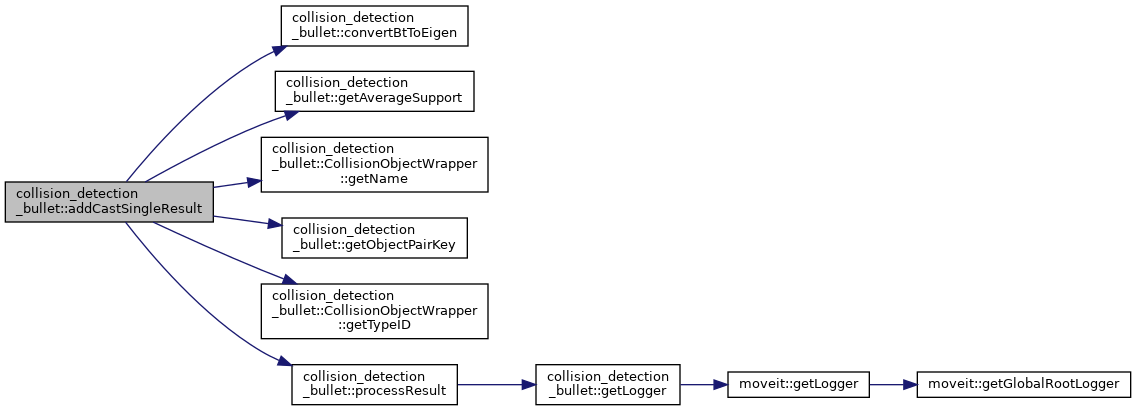
◆ addCastSingleResult()
|
inline |
Definition at line 419 of file bullet_utils.h.

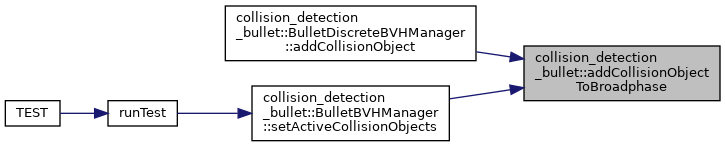
◆ addCollisionObjectToBroadphase()
| void collision_detection_bullet::addCollisionObjectToBroadphase | ( | const CollisionObjectWrapperPtr & | cow, |
| const std::unique_ptr< btBroadphaseInterface > & | broadphase, | ||
| const std::unique_ptr< btCollisionDispatcher > & | dispatcher | ||
| ) |
Add the collision object to broadphase.
- Parameters
-
cow The collision objects broadphase The bullet broadphase interface dispatcher The bullet collision dispatcher
Definition at line 387 of file bullet_utils.cpp.

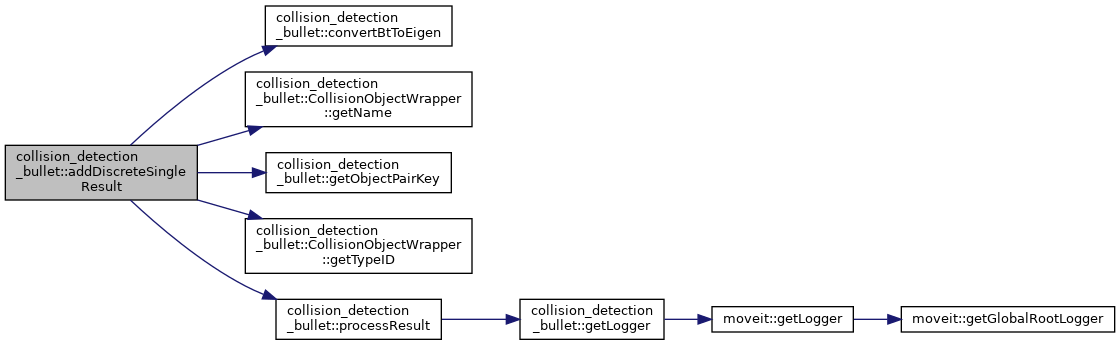
◆ addDiscreteSingleResult()
|
inline |
Converts a bullet contact result to MoveIt format and adds it to the result data structure.
Definition at line 386 of file bullet_utils.h.

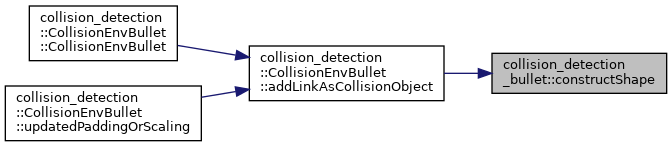
◆ constructShape()
| shapes::ShapePtr collision_detection_bullet::constructShape | ( | const urdf::Geometry * | geom | ) |
Definition at line 70 of file ros_bullet_utils.cpp.

◆ convertBtToEigen()
|
inline |
Converts bullet vector to eigen vector.
Definition at line 71 of file bullet_utils.h.

◆ convertEigenToBt() [1/4]
|
inline |
Converts bullet transform to eigen transform.
Definition at line 92 of file bullet_utils.h.

◆ convertEigenToBt() [2/4]
|
inline |
Converts eigen matrix to bullet matrix.
Definition at line 84 of file bullet_utils.h.
◆ convertEigenToBt() [3/4]
|
inline |
Converts eigen quaternion to bullet quaternion.
Definition at line 77 of file bullet_utils.h.
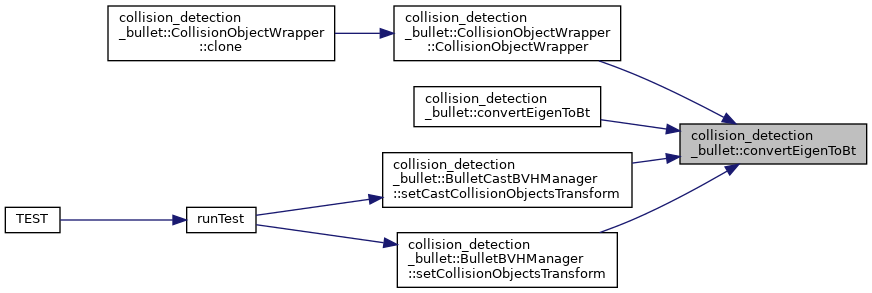
◆ convertEigenToBt() [4/4]
|
inline |
Converts eigen vector to bullet vector.
Definition at line 65 of file bullet_utils.h.
◆ createConvexHull()
| int collision_detection_bullet::createConvexHull | ( | AlignedVector< Eigen::Vector3d > & | vertices, |
| std::vector< int > & | faces, | ||
| const AlignedVector< Eigen::Vector3d > & | input, | ||
| double | shrink = -1, |
||
| double | shrinkClamp = -1 |
||
| ) |
Create a convex hull from vertices using Bullet Convex Hull Computer.
- Parameters
-
(Output) vertices A vector of vertices (Output) faces The first values indicates the number of vertices that define the face followed by the vertice index (input) input A vector of point to create a convex hull from (input) shrink If positive, the convex hull is shrunken by that amount (each face is moved by "shrink" length units towards the center along its normal). (input) shrinkClamp If positive, "shrink" is clamped to not exceed "shrinkClamp * innerRadius", where "innerRadius" is the minimum distance of a face to the center of the convex hull.
- Returns
- The number of faces. If less than zero an error occurred when trying to create the convex hull
Definition at line 123 of file contact_checker_common.cpp.


◆ createShapePrimitive() [1/7]
| btCollisionShape* collision_detection_bullet::createShapePrimitive | ( | const shapes::Box * | geom, |
| const CollisionObjectType & | collision_object_type | ||
| ) |
Definition at line 84 of file bullet_utils.cpp.
◆ createShapePrimitive() [2/7]
| btCollisionShape* collision_detection_bullet::createShapePrimitive | ( | const shapes::Cone * | geom, |
| const CollisionObjectType & | collision_object_type | ||
| ) |
Definition at line 112 of file bullet_utils.cpp.
◆ createShapePrimitive() [3/7]
| btCollisionShape* collision_detection_bullet::createShapePrimitive | ( | const shapes::Cylinder * | geom, |
| const CollisionObjectType & | collision_object_type | ||
| ) |
Definition at line 103 of file bullet_utils.cpp.
◆ createShapePrimitive() [4/7]
| btCollisionShape* collision_detection_bullet::createShapePrimitive | ( | const shapes::Mesh * | geom, |
| const CollisionObjectType & | collision_object_type, | ||
| CollisionObjectWrapper * | cow | ||
| ) |

◆ createShapePrimitive() [5/7]
| btCollisionShape* collision_detection_bullet::createShapePrimitive | ( | const shapes::OcTree * | geom, |
| const CollisionObjectType & | collision_object_type, | ||
| CollisionObjectWrapper * | cow | ||
| ) |

◆ createShapePrimitive() [6/7]
| btCollisionShape * collision_detection_bullet::createShapePrimitive | ( | const shapes::ShapeConstPtr & | geom, |
| const CollisionObjectType & | collision_object_type, | ||
| CollisionObjectWrapper * | cow | ||
| ) |
Casts a geometric shape into a btCollisionShape.
Definition at line 400 of file bullet_utils.cpp.


◆ createShapePrimitive() [7/7]
| btCollisionShape* collision_detection_bullet::createShapePrimitive | ( | const shapes::Sphere * | geom, |
| const CollisionObjectType & | collision_object_type | ||
| ) |
Definition at line 96 of file bullet_utils.cpp.
◆ getActiveLinkNamesRecursive()
| void collision_detection_bullet::getActiveLinkNamesRecursive | ( | std::vector< std::string > & | active_links, |
| const urdf::LinkConstSharedPtr & | urdf_link, | ||
| bool | active | ||
| ) |
Recursively traverses robot from root to get all active links.
- Parameters
-
active_links Stores the active links urdf_link The current urdf link representation active Indicates if link is considered active
Definition at line 42 of file ros_bullet_utils.cpp.
◆ getAverageSupport()
|
inline |
Computes the local supporting vertex of a convex shape.
If multiple vertices with equal support products exists, their average is calculated and returned.
- Parameters
-
shape The convex shape to check localNormal The support direction to search for in shape local coordinates outsupport The value of the calculated support mapping outpt The computed support point
Definition at line 344 of file bullet_utils.h.

◆ getLogger()
| rclcpp::Logger collision_detection_bullet::getLogger | ( | ) |

◆ getObjectPairKey()
|
inline |
Get a key for two object to search the collision matrix.
- Parameters
-
obj1 First collision object name obj2 Second collision object name
- Returns
- The collision pair key
Definition at line 40 of file contact_checker_common.h.

◆ isLinkActive()
|
inline |
This will check if a link is active provided a list. If the list is empty the link is considered active.
- Parameters
-
active List of active link names name The name of link to check if it is active.
Definition at line 50 of file contact_checker_common.h.

◆ isOnlyKinematic()
|
inline |
Checks if the collision pair is kinematic vs kinematic objects.
Definition at line 520 of file bullet_utils.h.

◆ makeCastCollisionObject()
| CollisionObjectWrapperPtr collision_detection_bullet::makeCastCollisionObject | ( | const CollisionObjectWrapperPtr & | cow | ) |
Definition at line 293 of file bullet_utils.cpp.


◆ MOVEIT_CLASS_FORWARD() [1/4]
| collision_detection_bullet::MOVEIT_CLASS_FORWARD | ( | BulletBVHManager | ) |
◆ MOVEIT_CLASS_FORWARD() [2/4]
| collision_detection_bullet::MOVEIT_CLASS_FORWARD | ( | BulletCastBVHManager | ) |
◆ MOVEIT_CLASS_FORWARD() [3/4]
| collision_detection_bullet::MOVEIT_CLASS_FORWARD | ( | BulletDiscreteBVHManager | ) |
◆ MOVEIT_CLASS_FORWARD() [4/4]
| collision_detection_bullet::MOVEIT_CLASS_FORWARD | ( | CollisionObjectWrapper | ) |
◆ processResult()
| collision_detection::Contact * collision_detection_bullet::processResult | ( | ContactTestData & | cdata, |
| collision_detection::Contact & | contact, | ||
| const std::pair< std::string, std::string > & | key, | ||
| bool | found | ||
| ) |
Stores a single contact result in the requested way.
- Parameters
-
found Indicates if a contact for this pair of objects has already been found
- Returns
- Pointer to the newly inserted contact
Definition at line 44 of file contact_checker_common.cpp.


◆ removeCollisionObjectFromBroadphase()
|
inline |
Remove the collision object from broadphase.
- Parameters
-
cow The collision objects broadphase The bullet broadphase interface dispatcher The bullet collision dispatcher
Definition at line 692 of file bullet_utils.h.

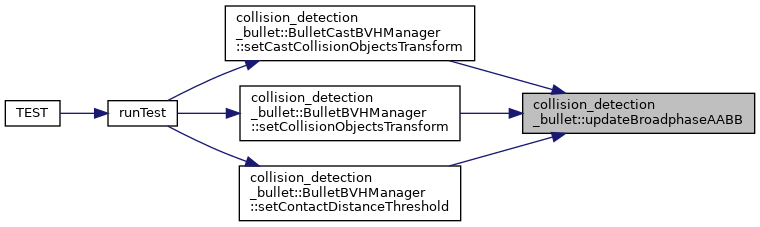
◆ updateBroadphaseAABB()
|
inline |
Update the Broadphase AABB for the input collision object.
- Parameters
-
cow The collision objects broadphase The bullet broadphase interface dispatcher The bullet collision dispatcher
Definition at line 677 of file bullet_utils.h.
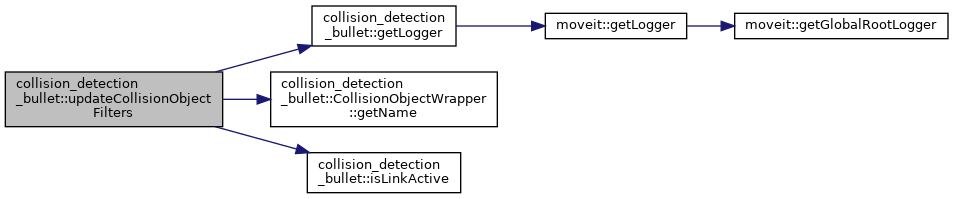
◆ updateCollisionObjectFilters()
| void collision_detection_bullet::updateCollisionObjectFilters | ( | const std::vector< std::string > & | active, |
| CollisionObjectWrapper & | cow | ||
| ) |
Update a collision objects filters.
- Parameters
-
active A list of active collision objects cow The collision object to update. continuous Indicate if the object is a continuous collision object.
Currently continuous collision objects can only be checked against static objects. Continuous to Continuous collision checking is currently not supports. TODO LEVI: Add support for Continuous to Continuous collision checking.
Definition at line 270 of file bullet_utils.cpp.

◆ urdfPose2Eigen()
| Eigen::Isometry3d collision_detection_bullet::urdfPose2Eigen | ( | const urdf::Pose & | pose | ) |

Variable Documentation
◆ BULLET_COMPOUND_USE_DYNAMIC_AABB
| const bool collision_detection_bullet::BULLET_COMPOUND_USE_DYNAMIC_AABB = true |
Definition at line 56 of file bullet_utils.h.
◆ BULLET_DEFAULT_CONTACT_DISTANCE
| const btScalar collision_detection_bullet::BULLET_DEFAULT_CONTACT_DISTANCE = 0.00f |
Definition at line 55 of file bullet_utils.h.
◆ BULLET_EPSILON
| const btScalar collision_detection_bullet::BULLET_EPSILON = 1e-3f |
Definition at line 54 of file bullet_utils.h.
◆ BULLET_LENGTH_TOLERANCE
| const btScalar collision_detection_bullet::BULLET_LENGTH_TOLERANCE = 0.001f METERS |
Definition at line 53 of file bullet_utils.h.
◆ BULLET_MARGIN
| const btScalar collision_detection_bullet::BULLET_MARGIN = 0.0f |
Definition at line 51 of file bullet_utils.h.
◆ BULLET_SUPPORT_FUNC_TOLERANCE
| const btScalar collision_detection_bullet::BULLET_SUPPORT_FUNC_TOLERANCE = 0.01f METERS |
Definition at line 52 of file bullet_utils.h.