



















ROS与激光雷达入门教程-ROS中使用激光雷达(Hokuyo网口)
ROS与激光雷达入门教程-ROS中使用激光雷达(Hokuyo网口)
说明:
- 介绍ROS如何接入Hokuyo网口的雷达及基本使用
- 测试雷达:UST-10LX采用太网接口,如果型号是USB口的参考教程
- ros wiki: http://wiki.ros.org/urg_node
UST-10LX激光雷达
HOKUYO公司UST-10LX 2D激光扫描测距产品拥有10m, 270°测量范围,DC12V/24V输入,25ms扫描时间,IP65防护等级,非接触式测量。
可用于高速运动机器人避障和位置识别;高精度、高分辨率、宽视场设计给自主导航机器人提供了良好的环境识别能力;紧凑型设计节约了安装空间,低重量、低功耗。
图示:

性能参数:
| 电源 | 10-30VDC±10%(消耗电流:Max:0.3A,典型:0.15A) |
| 激光光源 | 半导体激光二极管 (λ=905nm), 激光安全等级 1(FDA) |
| 测量距离 | 0.06 to 10m, Max.30m, 270° |
| 精度 | ±40mm |
| 角度分辨率 | 0.25° (360°/1,440 steps) |
| 扫描时间 | 25msec/scan |
| 噪音 | < 25dB |
| 接口 | Ethernet 100BASE-TX |
| 同步输出 | NPN 开集电极 |
| 指令系统 | 专用指令 SCIP Ver.2.2 |
| 接口 |
电源和I/O 接口:1m 电缆 Ethernet:0.3m 电缆, RJ45 |
| 环境温湿度 | -10 to +50 degrees C, < 85%RH(无凝露) |
| 振动 | 双振幅1.5mm 10 to 55Hz, 每轴2 个小时 |
| 冲击 | 196m/s2, 10 次, X, Y, Z 方向 |
| 防护等级 | IP65 |
| 重量 | 约130g(不包括电缆) |
- 注意:
- 户外的直接太阳强光照射可能会产生测量误差
- 使用时会产生热量,请在底座处安装200x200x20 的铝板用来散热
- 参数有可能随时改变
urg_node包安装
- deb包安装
$ sudo apt-get install ros-indigo-urg-node
- 源码安装
$ mkdir -p ~/turtlebot_ws/src
$ cd ~/turtlebot_ws/src
$ git clone https://github.com/ros-drivers/urg_node
#编译
$ cd ~/turtlebot_ws
$ catkin_make
修改Ubuntu的IP地址
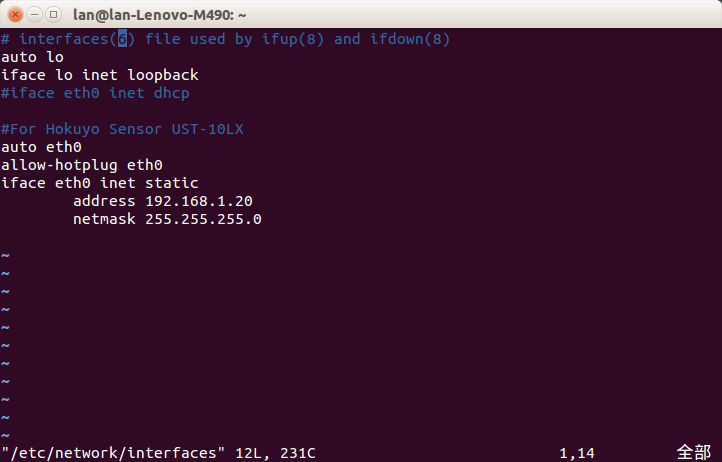
- 编辑/etc/network/interfaces,添加一个静态的IP地址
$ sudo gedit /etc/network/interfaces
- 在iface lo inet loopback添加:
auto eth0
allow-hotplug eth0
iface eth0 inet static
address 192.168.1.20
netmask 255.255.255.0
- 如图:
- 因为Hokuyo激光雷达的固定IP地址是“192.168.1.10”(出厂设置是“192.168.0.10”)
- 所以在Ubuntu上添加IP地址时,使用“192.168.1.XX”,设置为同一网段的IP地址。
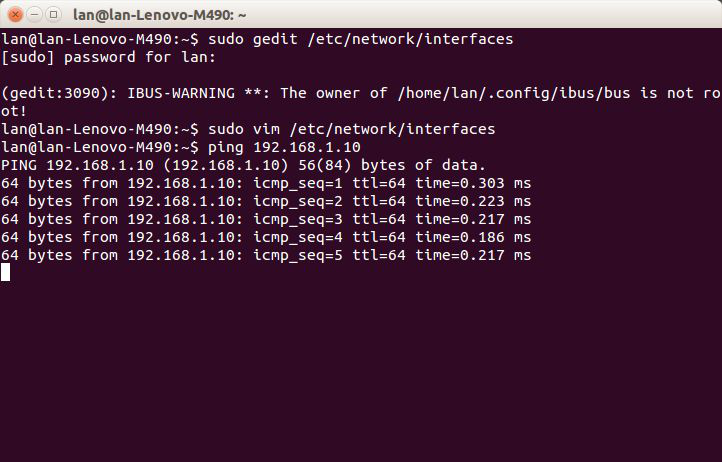
- 将激光雷达连在电脑上,确认连接:
$ ping 192.168.1.10
- 如图:
测试:
- 新终端,执行
$ roscore
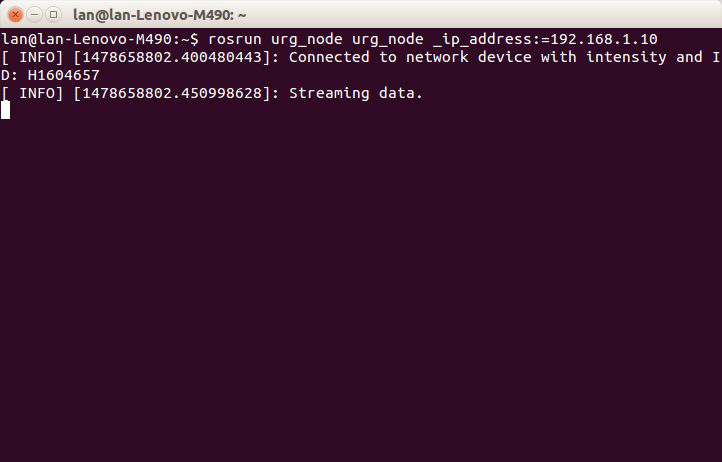
- 新终端,执行
$ rosrun urg_node urg_node _ip_address:=192.168.1.10
- 图示:
- 查看数据:
$ rostopic echo /scan
- 图示:

- 查看激光雷达扫描的消息类型和消息结构
$ rostopic type /scan
$ rosmsg show sensor_msgs/LaserScan
- 如图:

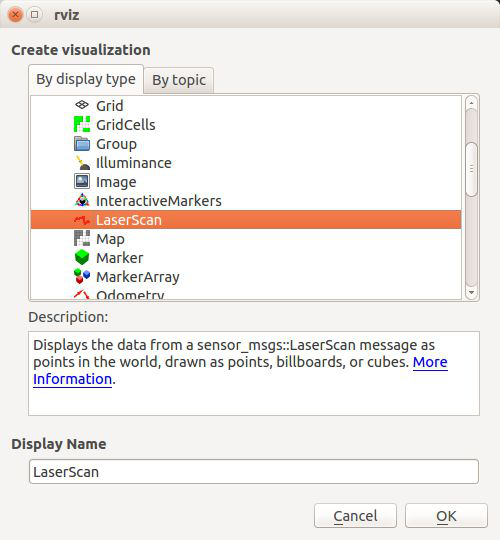
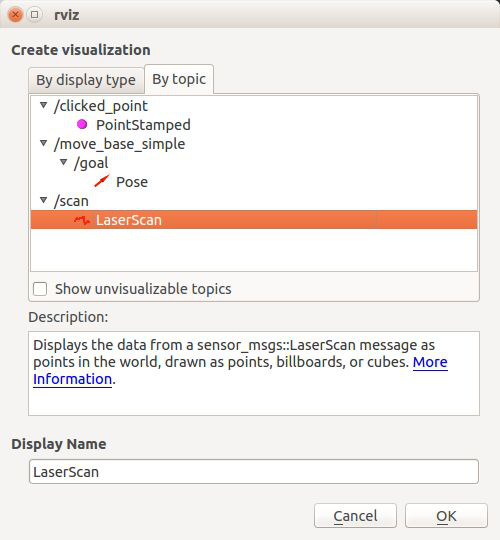
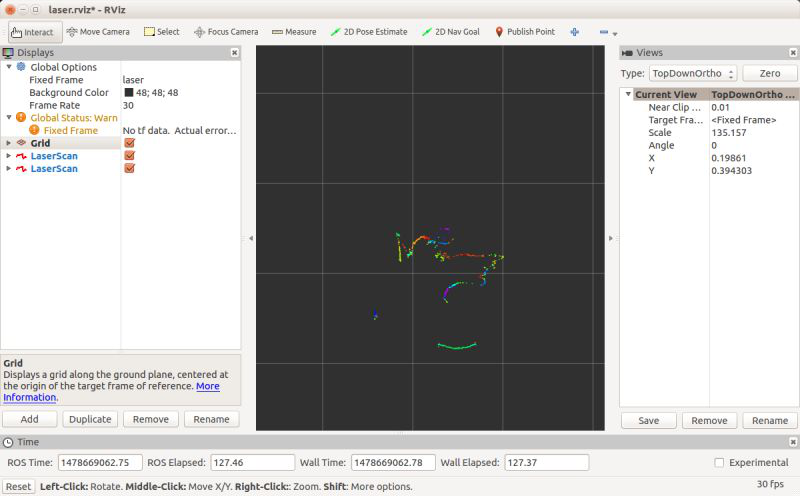
- rviz中查看激光数据:
$ rosrun rviz rviz
在Add中依次添加LaserScan和话题/scan下的LaserScan
图示:
参考:
- 整合自创客智造群网友(小郧子)
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号