



















ROS与Arduino-ros_arduino_bridge-功能包的使用
ros_arduino_bridge功能包的使用
说明
- 这个ROS功能包集包括了Arduino库(ROSArduinoBridge)和一系列用来控制基于Arduino的ROS功能包,它使用的是标准的ROS消息和服务。这个功能包集并不依赖于ROS串口
- 使用这个功能包时,注意选择相应的版本,因为不同的版本之间有些并不能兼容。indigo-devel branch是针对ROS Indigo以及更高版本的,它使用的是Catkin编译系统。
- 这个功能包集包括一个兼容不同驱动的机器人的基本控制器(base controller),它可以接收ROS Twist类型的消息,可以发布里程数据到个人电脑。这个控制器(base controller)要求使用一个电机控制器和编码器来读取里程数据
特点
- 可以直接支持ping声呐和Sharp红外线传感器
- 也可以从通用的模拟和数字信号的传感器读取数据
- 可以控制数字信号的输出
- 支持PWM伺服机
- 如果使用所要求的硬件的话,可以配置基本的控制
- 如果你的Arduino编程基础好的话,并且具有python基础的话,你就可以很自由的改动代码来满足你的硬件要求
目前indigo-devel版本的功能包集支持下面的控制器硬件
- Pololu VNH5019 dual motor controller shield or Pololu MC33926 dual motor shield.
- Robogaia Mega Encoder shield or on-board wheel encoder counters.
注意:
- Robogaia Mega Encoder shield 仅适用于Arduino Mega,
- 板上编码计数器(ARDUINO_ENC_COUNTER)目前仅支持Arduino Uno
- 上面非硬性规定,有一定的编程基础,你也可以按需更改
系统要求:
- 安装python-serial功能包(Ubuntu)
介绍:这个功能包集可以在兼容Arduino的控制器上进行读取传感器上的数据,以及控制PWM伺服机。但是你必须具备上面所说的被支持的硬件(电动机控制器和编码器),你才能使用这个功能包集中的基本控制器(base controller)
安装:
$ sudo apt-get install python-serial
或
$ sudo pip install --upgrade pyserial
或
$ sudo easy_install -U pyserial
- 安装电动机控制器和编码器合适的库
- 对于上面提到过的Pololu VNH5019 Dual Motor Shield,它的相应的库可以在这里找到:访问库
- 对于Pololu MC33926 Dual Motor Shield,则在这里可以找到对应的库:访问库
- Robogaia Mega Encoder shield的库可以在这里找到:访问库
- 这些库应该被安装到你的标准Arduino sketchbook/libraries路径下面
- 这个功能包集假设你使用的Arduino IDE的版本是1.0或以上。
Linux下连接Arduino
- Arduino很可能是通过接口/dev/ttyACM# 或者 /dev/ttyUSB#来连接你的Linux系统的。这里的#可以是0,1,2等数字,当然这根据你连接的设备数量而定。得到这个数字#最简单的方式就是拔掉所有的USB设备,然后插上你的Arduino,然后运行下面这个命令
$ ls /dev/ttyACM*
或
$ ls /dev/ttyUSB*
上面这两个命令的有一个可以返回你想要的结果(例如/dev/ttyACM0),假设你的Arduino连接的是/dev/ttyACM0
查看接口的访问权限
$ ls -l /dev/ttyACM0
crw-rw—- 1 root dialout 166, 0 2013-02-24 08:31 /dev/ttyACM0
- 上面的结果中,只有root和”dialout”组才有读写权限
- 你需要成为dialout组的一个成员。你仅仅需要马上加入这组中,并且它会对你之后插入的所有的USB设备都起作用。
- 运行这个命令来加入dialout组
$ sudo usermod -a -G dialout your_user_name
- 命令中your_user_name就是你在Linux下登录的用户名。之后你可能需要注销登录,然后再重新登录进去,或者就简单的重启一下电脑
- 确认已经成功让用户加入组,如果你可以在列出的组中找到dialout,这就说明你已经加入到dialout中了
$ groups
安装ros_arduino_bridge功能包集
- 安装ros_arduino_bridge
$ cd ~/catkin_workspace/src
$ git clone https://github.com/hbrobotics/ros_arduino_bridge.git
$ cd ~/catkin_workspace
$ catkin_make
- 这个被提供的Arduino库叫做ROSArduinoBridge,你可以在 ros_arduino_firmware功能包中找到
- 安装ROSArduinoBridge库:
- 进入SKETCHBOOK_PATH是指你的Arduino sketchbook路径
$ cd SKETCHBOOK_PATH
- CP命令就是把ROSArduinoBridge sketch文件拷贝到你的sketchbook文件夹下面
$ cp -rp `rospack find ros_arduino_firmware`/src/libraries/ROSArduinoBridge ROSArduinoBridge
- 如果之前已经有先删除
$ cd SKETCHBOOK_PATH
$ rm -R ROSArduinoBridge
- 编译上传ROSArduinoBridge的Sketch
- 打开Arduino IDE找到File->Sketchbook->ROSArduinoBridge
- 如果你正在使用基础控制器功能包(base controller),那么你必须确保你已经在Arduino sketchbook/libraries文件夹里面安装了合适的电动机控制器和编码器的相关库
- 你可以通过去掉或保留相关的宏定义声明,来选择你想用的电动机控制器,同时你还要将其他电动机控制器的宏声明注释掉,默认选择的是Pololu VNH5019 driver
- 你也可以用相同的方法选择你想使用的编码器。默认选择的是Pololu VNH5019 driver
- 想让你的基础控制器控制PWM伺服机的话,找到代码行:
//#define USE_SERVOS
#undef USE_SERVOS
更改为:
#define USE_SERVOS
//#undef USE_SERVOS
- 修改头文件servos.h改变其中的N_SERVOS参数,
- 你还需要根据你的伺服机所接的引脚修改相应的引脚数字
- 一切都准备好后,你就可以把这个sketch编译并上传到你的Arduino板子
固件测试
- 串口监视器
- 这个ROSArduino库接受单字母命令来轮询传感器、控制伺服机、驱动机器人以及读取编码器。
- 这些命令可以通过串口接口来发送给Arduino,比如Arduino的串口监视器
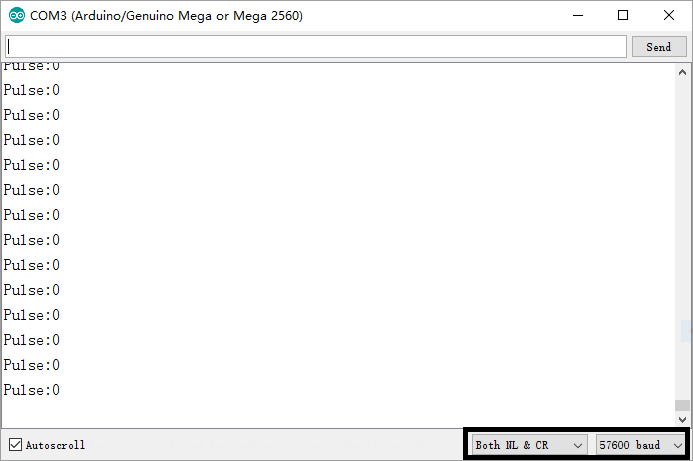
- 把串口监视器的波特率设置为57600然后把行结束符设置为“Carriage return(回车)”和“Both NL & CR”(NL和CR)。这些设置选项在串口监视器右下角的两个下拉菜单中。如下图所示:
- 目前的列表包括这些命令(命令列表可以在头文件commands.h中找到)
#define ANALOG_READ 'a'
#define GET_BAUDRATE 'b'
#define PIN_MODE 'c'
#define DIGITAL_READ 'd'
#define READ_ENCODERS 'e'
#define MOTOR_SPEEDS 'm'
#define PING 'p'
#define RESET_ENCODERS 'r'
#define SERVO_WRITE 's'
#define SERVO_READ 't'
#define UPDATE_PID 'u'
#define DIGITAL_WRITE 'w'
#define ANALOG_WRITE 'x'
- 命令使用例子
- 如果你想从模拟引脚pin3读取数据,就发送这个命令:
a 3 - 你想改变数字引脚pin3的模式为OUTPUT,就发送这个命令:
c 3 1 - 得到目前编码器的计数,就发送这个命令:
e - 让机器人以每秒20个encoder ticks的速度向前移动,就发送这个命令:
m 20 20 - 这些命令有些需要有对应的参数,比如a 3中3代表模拟引脚3
连线测试
在一个差速轮式机器人上,电动机使用两个极性相反的接头来连接到电动机控制器上的
同样地,连接到编码器上的A/B端也是互斥的。然而,你仍然需要确保这样两个要求:
- 当给一个正向的速度,轮子向前移动;
- 而当轮子向前移动时,编码器计数增加。
把机器人的轮子架空,你可以使用串口监视器来测试上述的两个要求。
你可以使用m命令来启动电动机,使用e命令来获取编码器计数,以及使用r命令来将编码器重置为0
在固件层,电动机的速度是按照编码器每秒的tick数来表示的,这样可以使编码器很容易解析(理解)它
假如轮子转速是每秒4000个编码器计数,那么命令m 20 20会以一个非常小的速度移动小车。(默认设置轮子仅仅移动2秒,你可以通过修改源码中的AUTO_STOP_INTERVAL改变这个值),第一个参数是左轮的速度,另一个参数是右轮的速度。
当使用e命令时,第一个被返回的数是左轮的编码器计数,第二个数是右轮的编码器计数。
可以先使用r命令把编码器计数清零,然后通过手动粗略地旋转轮子一整圈,再通过e命令来验证获取到的编码器计数是否为预期的结果
配置ros_arduino_python节点
- 编辑ros_arduino_python/config路径下的YAML文件定义的机器人尺寸,PID参数,以及传感器配置信息。
$ roscd ros_arduino_python/config
$ cp arduino_params.yaml my_arduino_params.yaml #复制一个副本
$ vim my_arduino_params.yaml #查看内容
- my_arduino_params.yaml代码
# For a direct USB cable connection, the port name is typically
# /dev/ttyACM# where is # is a number such as 0, 1, 2, etc
# For a wireless connection like XBee, the port is typically
# /dev/ttyUSB# where # is a number such as 0, 1, 2, etc.
port: /dev/ttyACM0
baud: 57600
timeout: 0.1
rate: 50
sensorstate_rate: 10
use_base_controller: False
base_controller_rate: 10
# For a robot that uses base_footprint, change base_frame to base_footprint
base_frame: base_link
# === Robot drivetrain parameters
#wheel_diameter: 0.146
#wheel_track: 0.2969
#encoder_resolution: 8384 # from Pololu for 131:1 motors
#gear_reduction: 1.0
#motors_reversed: True
# === PID parameters
#Kp: 10
#Kd: 12
#Ki: 0
#Ko: 50
#accel_limit: 1.0
# === Sensor definitions. Examples only - edit for your robot.
# Sensor type can be one of the following:
# * Ping
# * GP2D12
# * Analog
# * Digital
# * PololuMotorCurrent
# * PhidgetsVoltage
# * PhidgetsCurrent (20 Amp, DC)
sensors: {
#motor_current_left: {pin: 0, type: PololuMotorCurrent, rate: 5},
#motor_current_right: {pin: 1, type: PololuMotorCurrent, rate: 5},
#ir_front_center: {pin: 2, type: GP2D12, rate: 10},
#sonar_front_center: {pin: 5, type: Ping, rate: 10},
onboard_led: {pin: 13, type: Digital, rate: 5, direction: output}
}
# Joint name and configuration is an example only
joints: {
head_pan_joint: {pin: 3, init_position: 0, init_speed: 90, neutral: 90, min_position: -90, max_position: 90, invert: False, continuous: False},
head_tilt_joint: {pin: 5, init_position: 0, init_speed: 90, neutral: 90, min_position: -90, max_position: 90, invert: False, continuous: False}
}
- 不要在你的.yaml文件里使用tab,否则的话这个语法解析器会无法加载它。如果你要缩进的话必须用空格代替tab键
- 当定义你的传感器参数时,列表中的最后一个传感器的行尾(花括号后面)后没有逗号,但是其余的行尾必须有逗号。
- 解释代码
接口设置
- 接口要么是/dev/ttyACM0,要么是/dev/ttyUSB0,视情况而定
- 其中MegaRobogaiaPololu的Arudino sketch默认是以57600的波特率连接的。
轮询速率
- 跳出ROS loop运行的速率主要就取决于这个速率参数(默认为50Hz),这个默认值足以满足大多数情况。在任何情况下,它应该至少与你的传感器的最大速率(下面我们会说到)一样快才行
- sensorstate_rate决定了多久发布一个所有传感器的集合列表,每个传感器也以各自的速率在各自的主题上发布消息。
- use_base_controller参数默认为False。你可以把它设置为True(假设你有文中所要求的硬件设施)。
- 设置PID参数base_controller_rate参数决定了多久发布一次里程计读取信息。
定义传感器
- sensors参数按照定义了传感器的名字和参数的字典(可任意指定,传感器的名字也会成为那个传感器所对应主题的名字)
- 四个最重要的参数分别是:pin,type,rate,direction。
- rate定义了你每秒想轮询一次那个传感器多少次。例如,一个电压传感器可能每秒仅仅被轮询一次(或者仅仅每两秒一次),而一个声呐传感器可能每秒被轮询20次。
- type必须是列表中被列出来的(注意区分大小写!)。
- direction默认是input,所以如果你想将它定义为output,就将这个direction单独设为output。
- 在上面的例子中,Arduino LED(pin13)将会以每秒两次的速率被点亮或熄灭。
设置Drivetrain(驱动系统)和PID参数
- 为了使用基础控制器(base controller),你必须去掉它的注释并且设置机器人的drivetrain和PID参数
- 示例中drivetrain参数是直径6英寸的驱动轮,距离11.5英寸
- 注意在ROS中使用米作为距离单位,所以一定要换算单位
- 示例中的编码器的分辨率(每转的tick数)规格来自于Pololu 131:1电动机。为你的电动机/编码器组合设置合理的数值
- 如果你的轮子可以向后转,那么就把motors_reversed设置为true,否则的话就设置为False
- PID参数比较难设置,你可以先按照示例中的值设置。但是在你第一次发送转弯命令的时候,架空小车测试。
启动ros_arduino_python节点
- 查看ros_arduino_python/launch下的文件arduino.launch,它指向一个名叫my_arduino_params.yaml的文件
<launch>
<node name="arduino" pkg="ros_arduino_python" type="arduino_node.py" output="screen" clear_params="true">
<rosparam file="$(find ros_arduino_python)/config/my_arduino_params.yaml" command="load" />
</node>
</launch>
- 如果你的配置文件命名不同,那么就把这里的文件名参数(my_arduino_params.yaml)修改成你的配置文件的名字
- 连接好Arduino, 关闭串口监视器,启动 ros_arduino_python node节点
$ roslaunch ros_arduino_python arduino.launch
- 启动之前,千万不要打开Arduino IDE 的串口监视器,因为串口监视器会与该节点争夺串口资源
出现效果:
process[arduino-1]: started with pid [6098]
Connecting to Arduino on port /dev/ttyUSB0 …
Connected at 57600
Arduino is ready.
[INFO] [WallTime: 1355498525.954491] Connected to Arduino on port / > dev/ttyUSB0 at 57600 baud
[INFO] [WallTime: 1355498525.966825] motor_current_right {‘rate’: 5, > ‘type’: ‘PololuMotorCurrent’, ‘pin’: 1}
[INFO]
etc
- 如果你在你的机器人上装的有Ping声呐而且你也在配置文件里面定义了它们,它们就会闪一下来告诉你已经连接成功
查看传感器数据
- 查看所有传感器的数据
$ rostopic echo /arduino/sensor_state
- 查看任何指定的传感器数据
$ rostopic echo /arduino/sensor/sensor_name
例如:有一个叫做ir_front_center的传感器,查看相应的数据
$ rostopic echo /arduino/sensor/ir_front_center
使用rxqrt来将这系列数据用图像的形式表示出来
$ rxplot -p 60 /arduino/sensor/ir_front_center/range
发送Twist命令与查看里程计数据
- 把你的机器人放到块上使轮子悬空,然后发布一个Twist命令
$ rostopic pub -1 /cmd_vel geometry_msgs/Twist '{ angular: {z: 0.5} }'
- 两个轮子的转动方向应该是一致的,都是逆时针转动(右轮前进,左轮后退)。如果它们转动方向相反,那么就将motors_reversed 参数改为与之前相反的值,然后用ctrl+c 停止该节点,然后重新启动arduino.launch文件。
- 使用下面的命令可以使机器人停止
$ rostopic pub -1 /cmd_vel geometry_msgs/Twist '{}'
- 查看里程数据可以运行
$ rostopic echo /odom
或者使用图形界面显示:
$ rxplot -p 60 /odom/pose/pose/position/x:y, /odom/twist/twist/linear/x, /odom/twist/twist/angular/z
ROS服务
- digital_set_direction-设置数字引脚的方向
$ rosservice call /arduino/digital_set_direction pin direction
- 这里pin是引脚数字,direction为0代表输入,1代表输出。
- digital_write-给数字引脚发送高低电平(LOW为0,HIGH为1)
$ rosservice call /arduino/digital_write pin value
- 同样,这里pin是引脚数字,value是电平高低(LOW为0,HIGH为1)。
- servo_write-设置伺服机位置
$ rosservice call /arduino/servo_write id pos
- 这里id是伺服机的索引号(定义在Arduino sketch中的servos.h)并且pos是以弧度为单位(0-3.14),头文件servos.h中具体是这样写的:
byte servoInitPosition [N_SERVOS] = { 90, 90 }; // [0, 180] degrees
- servo_read -读取伺服机的位置
$ rosservice call /arduino/servo_read id
使用板上编码器计数(仅支持ArduinoUno)
对于Arduino Uno,这个固件程序支持板上的编码器计数。这样的话,编码器就直接可以连接到Arduino板上,而不用借助任何额外的编码器设备(例如RoboGaia encoder shield)
对于速度,这个代码可以直接找到Atmega328p的接口和中断管脚,而这一功能的实现必须依赖Atmega328p(Arduino Uno)。(尽管它也可能兼容其他电路板或AVR单片机芯片)
为了使用这个板上编码器计数,按照下面的要求来将编码器连接到Arduino Uno:
Left wheel encoder A output -- Arduino UNO pin 2
Left wheel encoder B output -- Arduino UNO pin 3
Right wheel encoder A output -- Arduino UNO pin A4
Right wheel encoder B output -- Arduino UNO pin A5
- 这时你需要在Arduino sketch中做相应的修改,通过下面的方式来取消使用RoboGaia encoder shield的代码,启用板上编码器的代码。
/* The RoboGaia encoder shield */
//#define ROBOGAIA
/* Encoders directly attached to Arduino board */
#define ARDUINO_ENC_COUNTER
- 这时你就可以编译并上传到Arduino上了。
补充
- 如果你没有文档中所要求的硬件来运行这个基础控制器,但是你仍然想使用其他兼容Arduino的控制器来读取传感器以及控制PWM伺服机,那么请按照下面的步骤:
- 首先,你需要编辑你的ROSArduinoBridge sketch,在文件的最前面,将这两行:
#define USE_BASE
//#undef USE_BASE
改成这样:
//#define USE_BASE
#undef USE_BASE
- 你还需要将文件encoder_driver.ino中的这一行注释掉:
#include "MegaEncoderCounter.h"
你就可以编译并上传你的代码
然后,编辑你的 my_arduino_params.yaml文件,确保参数use_base_controller被设为False。这样你就完成了
参考:
- https://github.com/hbrobotics/ros_arduino_bridge
- 机械工业出版社,ROS机器人程序设计
- http://answers.ros.org/question/233848/polling-rates/
- http://blog.csdn.net/github_30605157/article/details/51344150
获取最新文章: 扫一扫右上角的二维码加入“创客智造”公众号